Autonomous Vehicle HMI (Thailand deployment)
- ROS
- WebSocket
- HMI
- Computer Vision
- Ultrasonic Radar
- Embedded
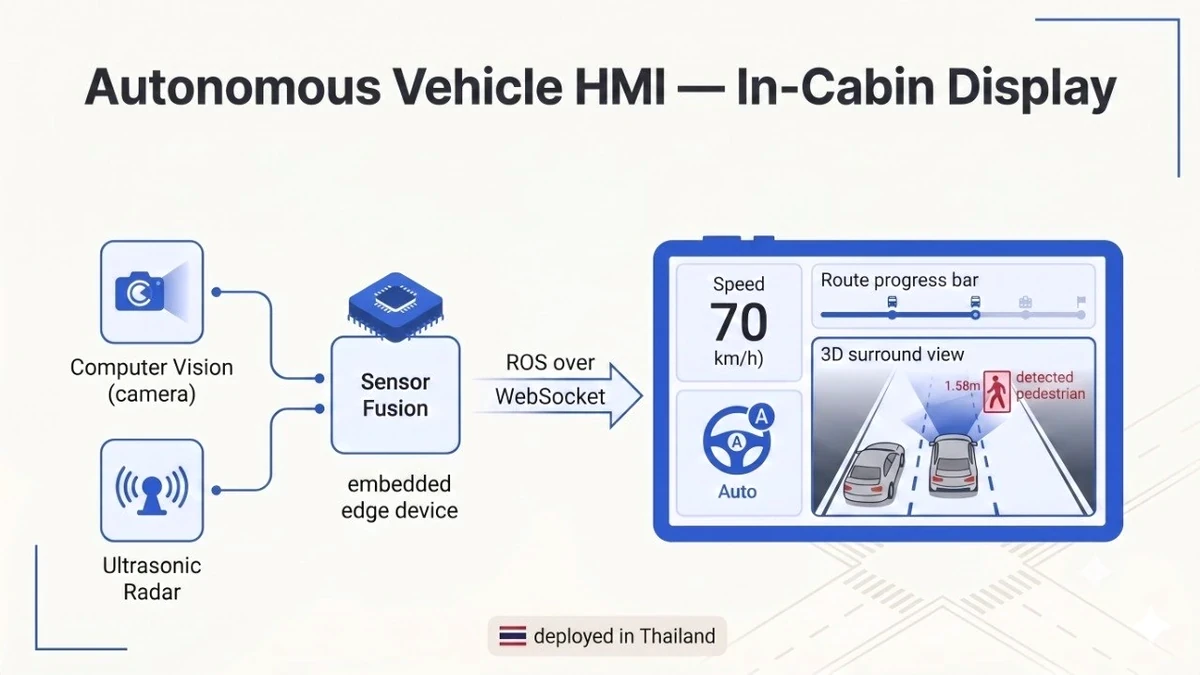
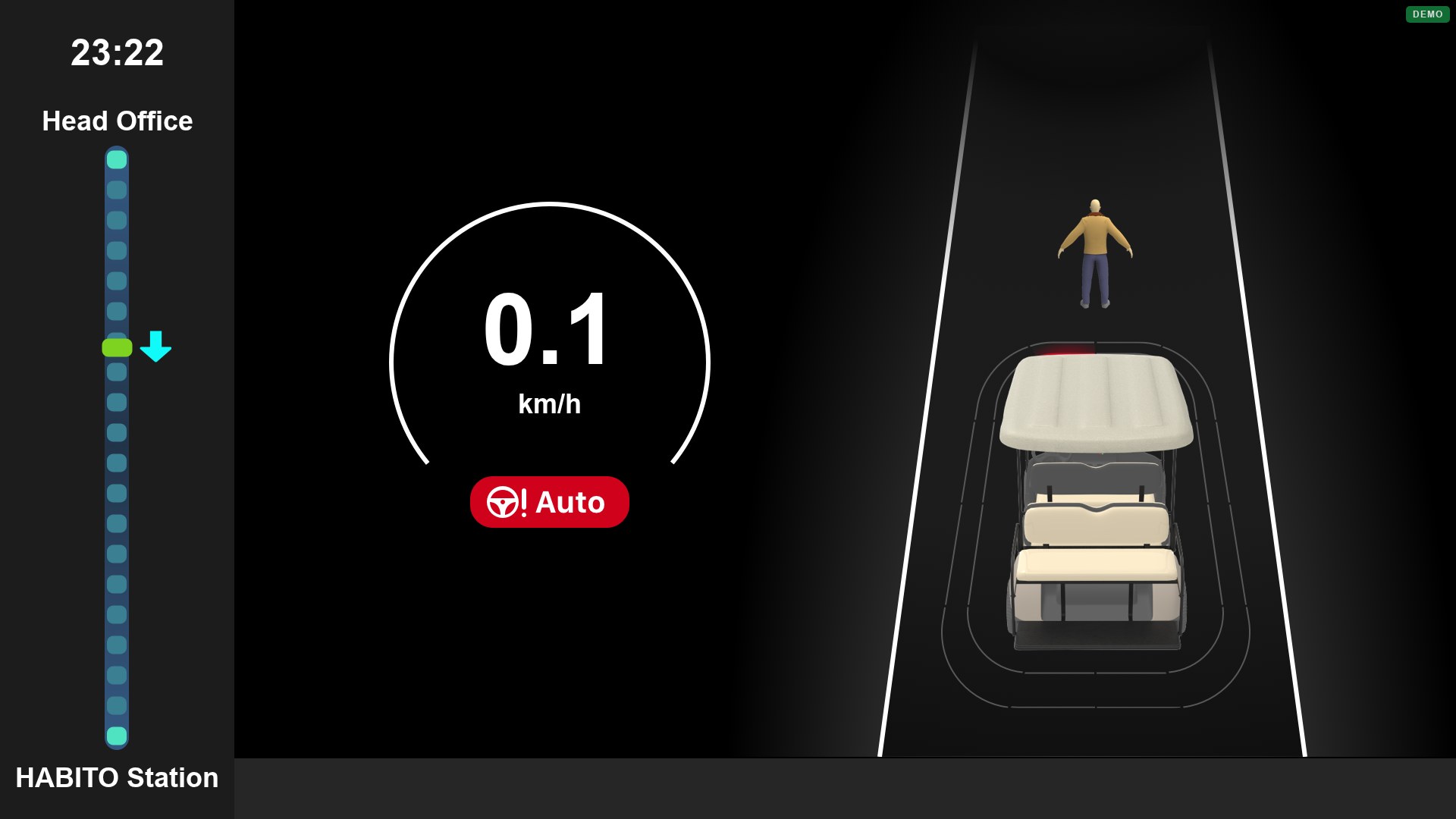
A real-time human-machine interface (HMI) for an autonomous shuttle, deployed and operating in the field in Thailand.
The interface shows key vehicle state (speed, route progress, Auto self-driving mode) and renders a live 3D view of the surroundings with detected pedestrians and obstacles (the pedestrian ahead in the photo is flagged by the system). The backend fuses ultrasonic radar and computer-vision signals, transmitted via ROS over WebSocket, with edge-side processing and display for intuitive, reliable situational awareness for driver and passengers.
The photo is from live operation in Thailand: the vehicle drives in Auto mode at low speed while the interface flags a pedestrian ahead in real time.

More projects ←→
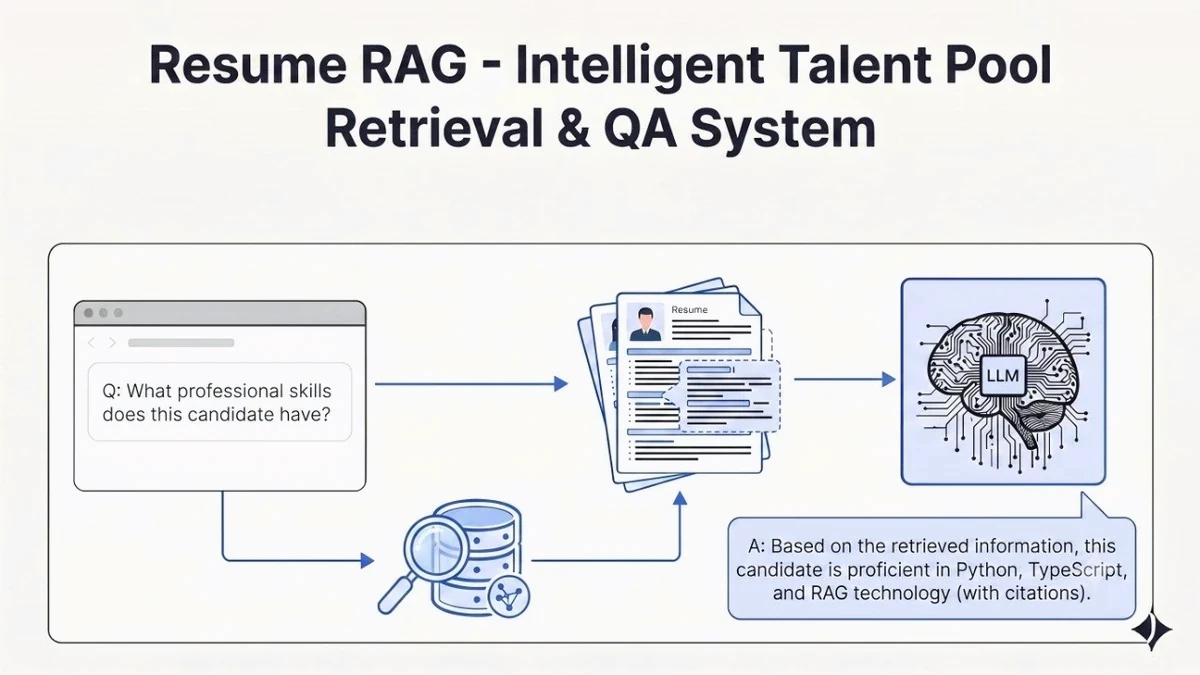
Resume RAG: Ask my resume
- Cloudflare Workers AI
- Vectorize
- bge-m3
- Llama 3.3
- RAG
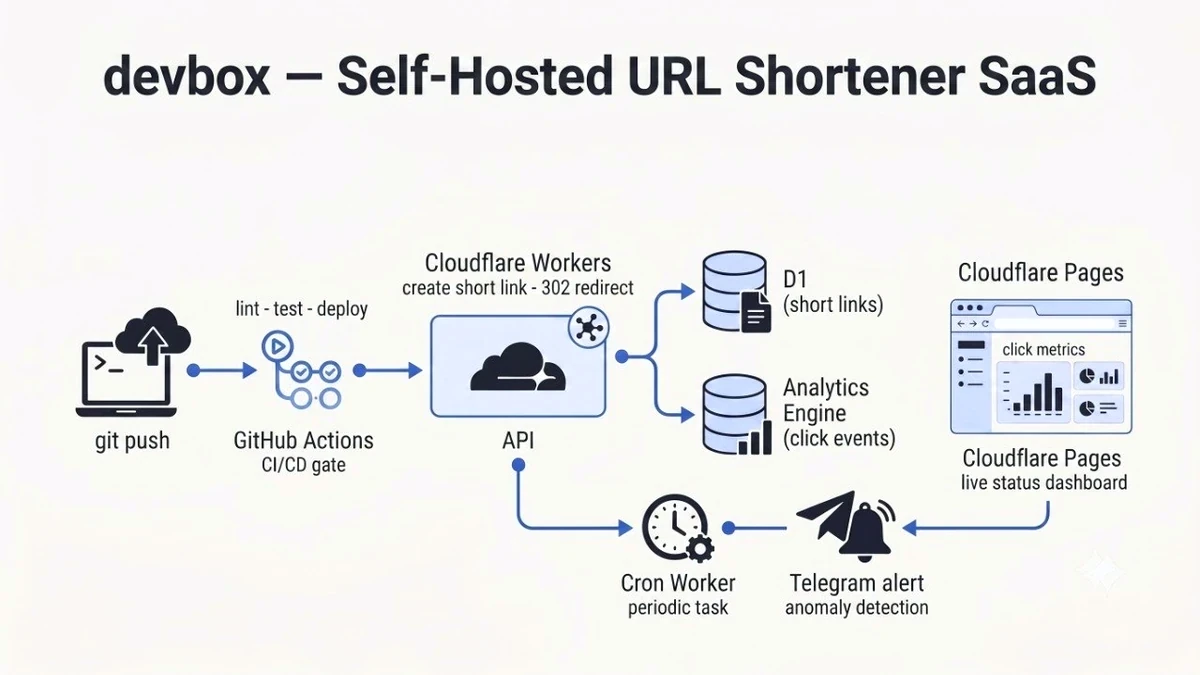
devbox: self-hosted URL-shortener SaaS
- Cloudflare Workers
- D1
- Analytics Engine
- GitHub Actions
- Astro
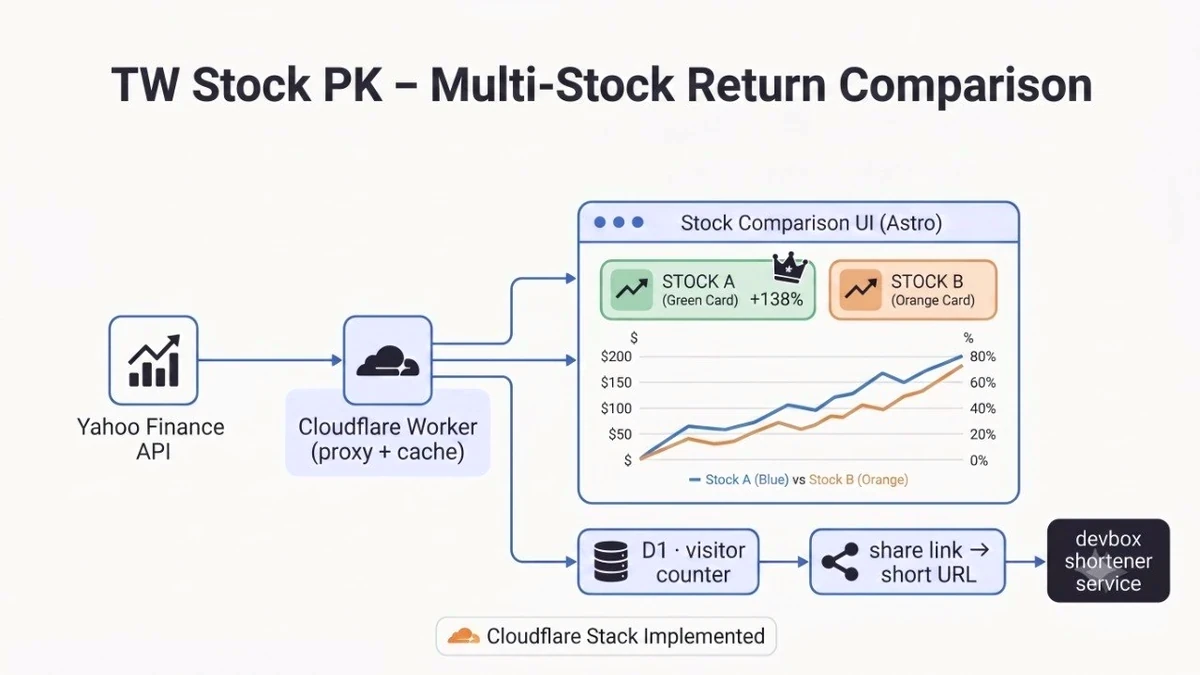
US & TW Stock PK: multi-stock return comparison
- Cloudflare Workers
- Pages
- D1
- Astro
- TypeScript
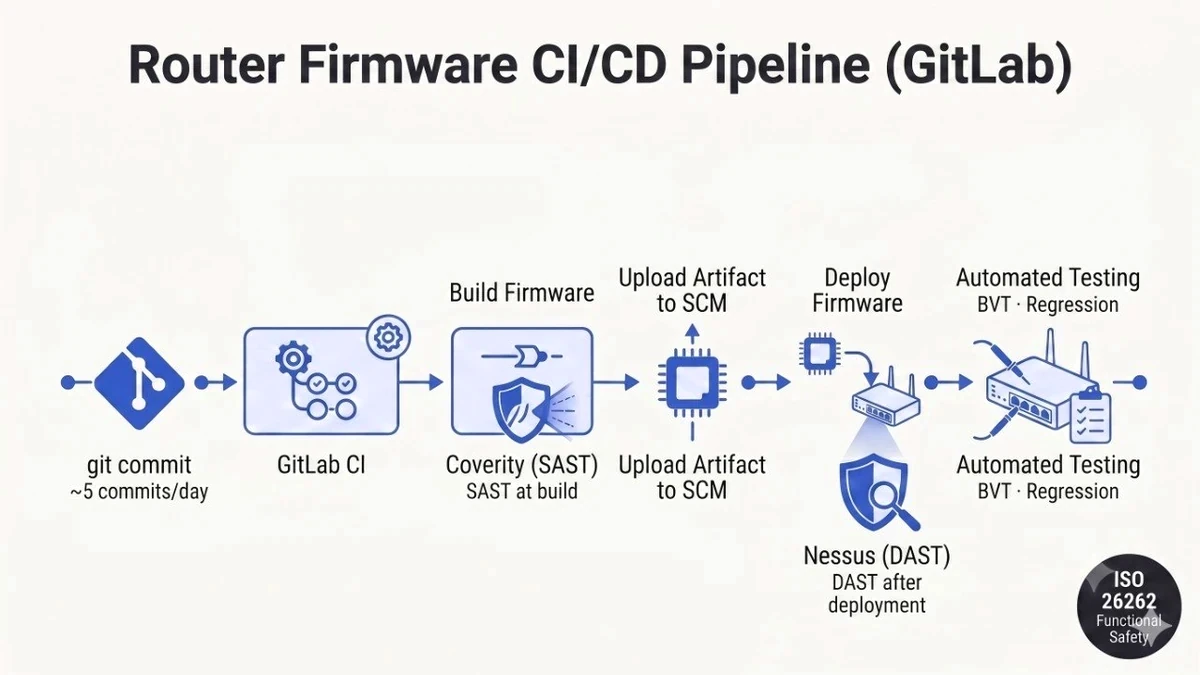
Router Firmware CI/CD Pipeline (GitLab)
- GitLab CI/CD
- ISO 26262
- Coverity
- Nessus
- SAST
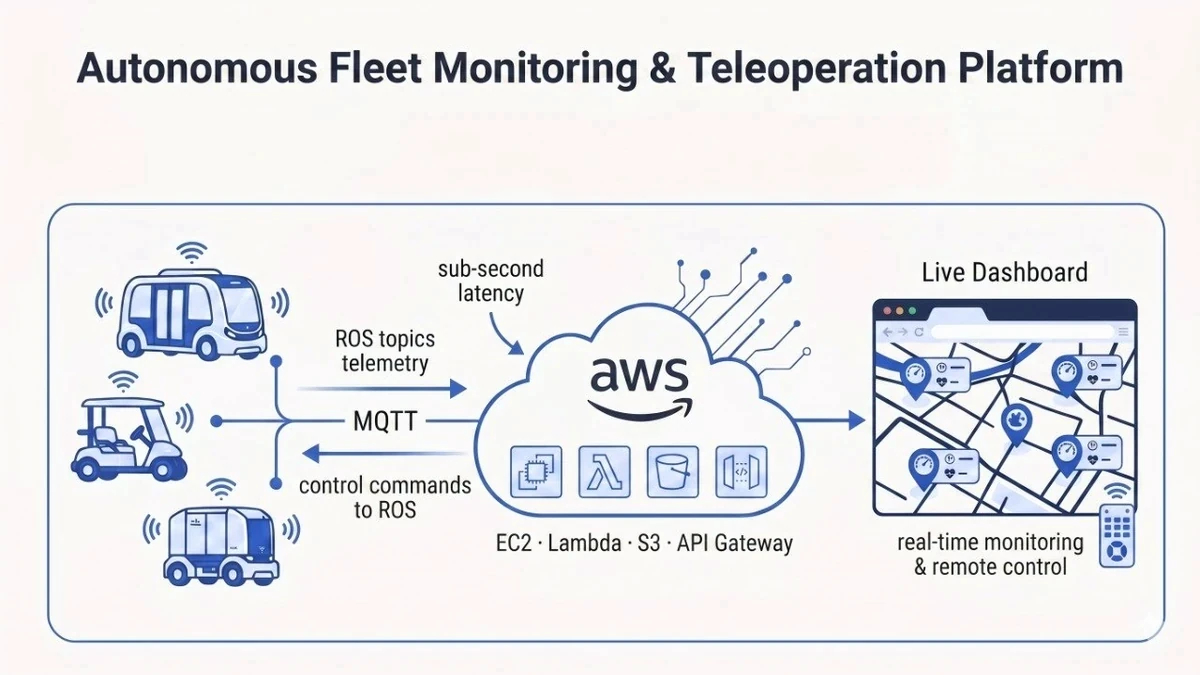
Autonomous Fleet Monitoring & Remote-Control Platform
- AWS
- MQTT
- ROS
- Autoware
- WebSocket
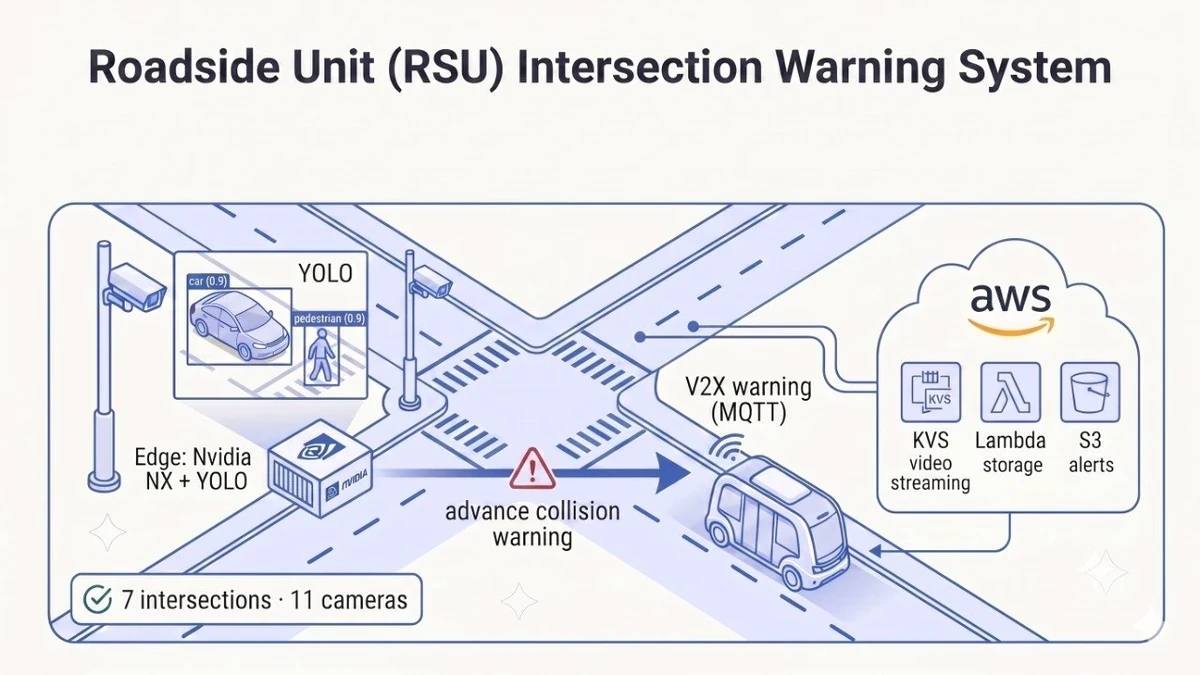
Roadside Unit (RSU) Intersection Warning System
- Nvidia NX
- YOLO
- AWS KVS
- Lambda
- S3
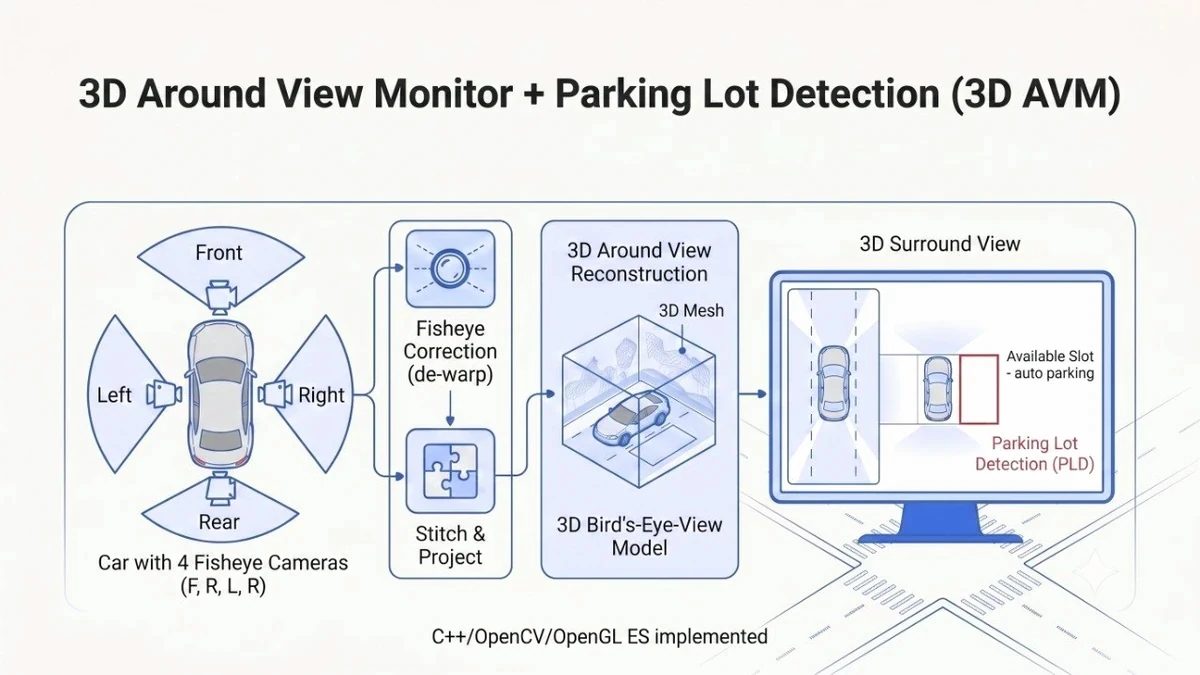
3D Around View Monitoring + Parking Detection (3D AVM)
- OpenCV
- OpenGL ES
- 3D Reconstruction
- Fisheye Calibration
- C++