3D Around View Monitoring + Parking Detection (3D AVM)
- OpenCV
- OpenGL ES
- 3D Reconstruction
- Fisheye Calibration
- C++
- Nvidia
- Fujitsu
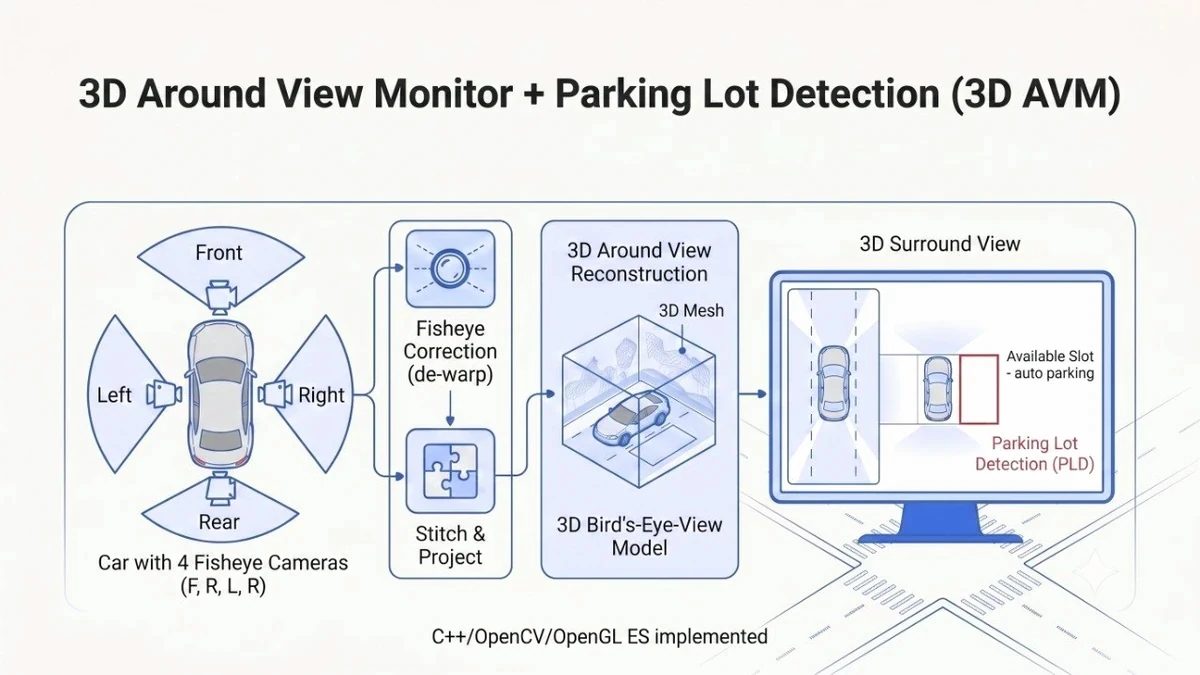
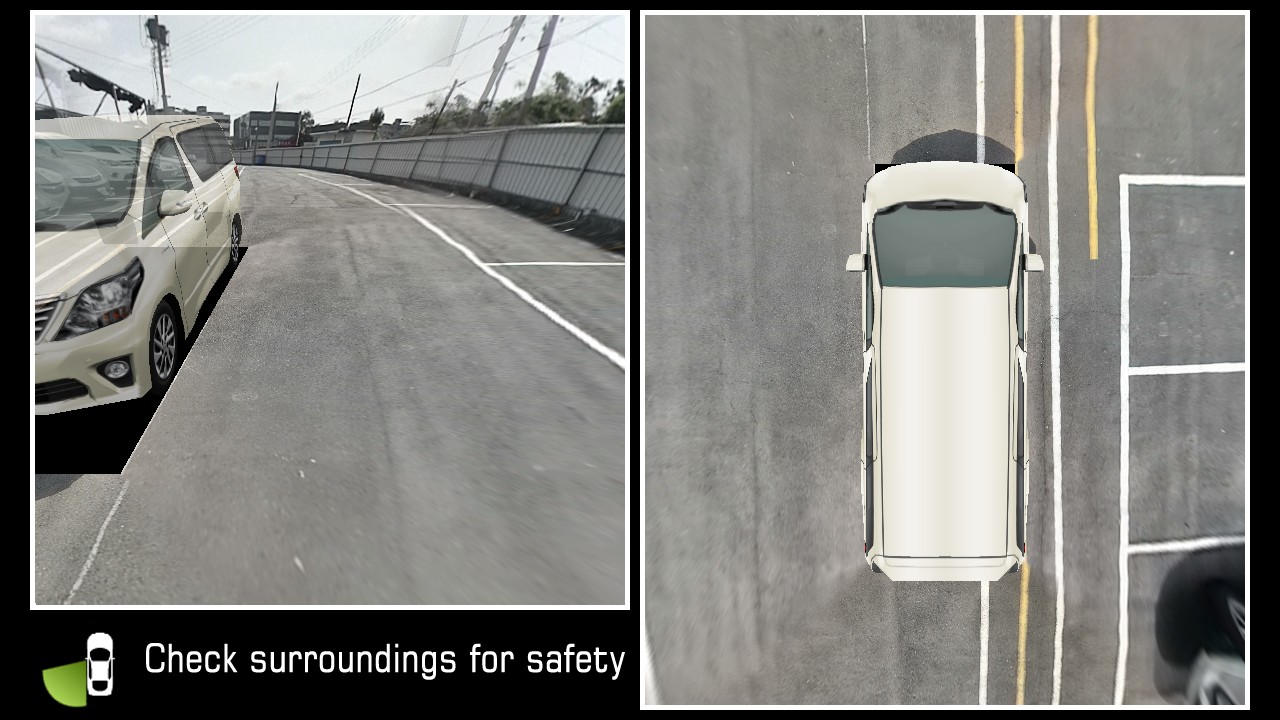
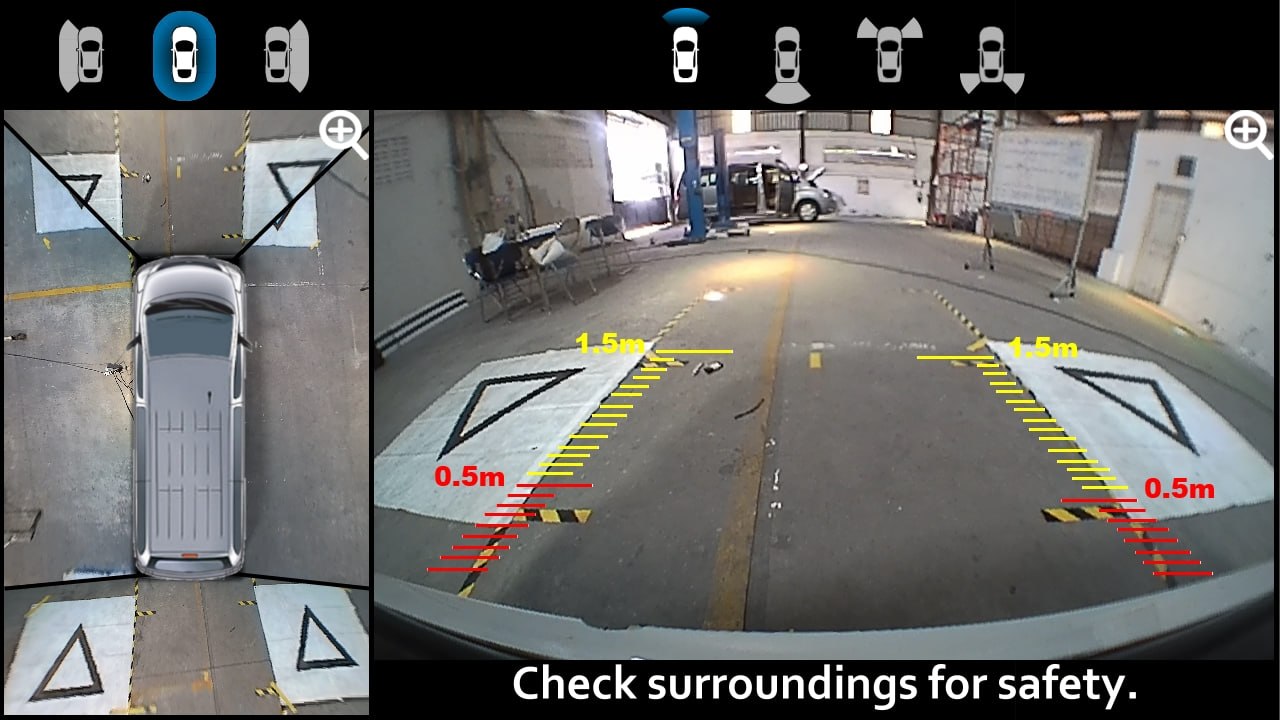
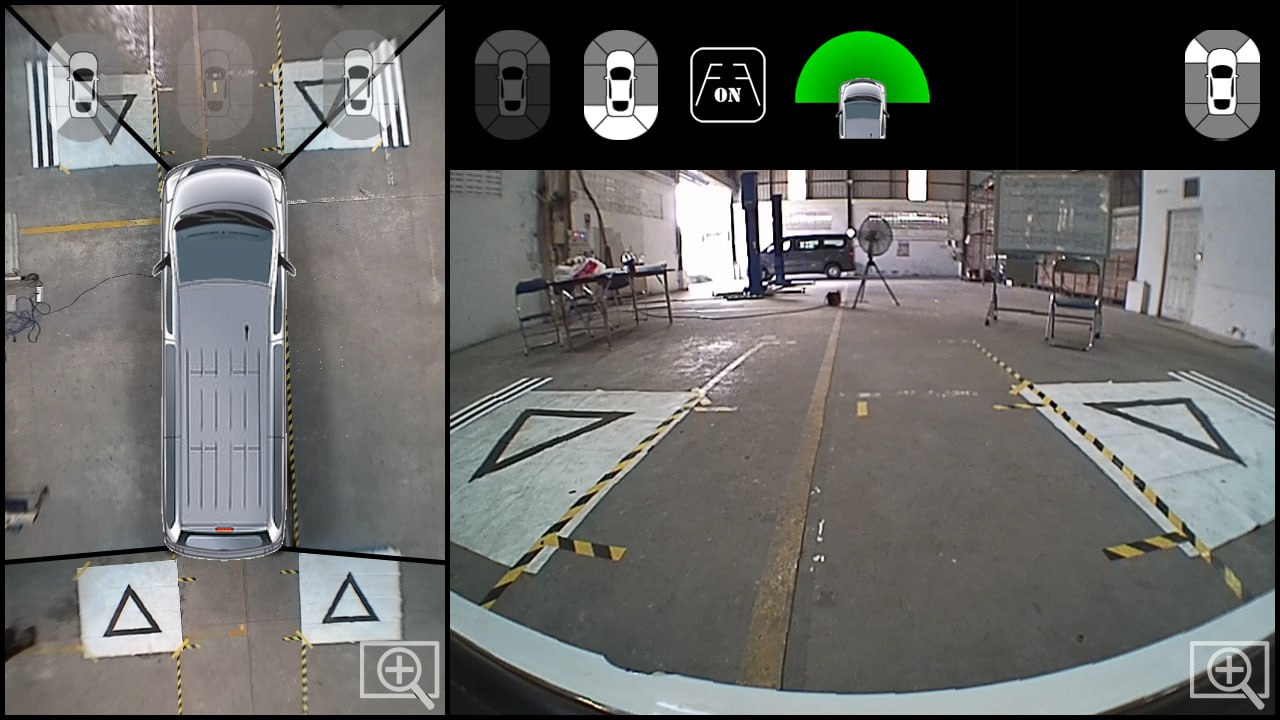
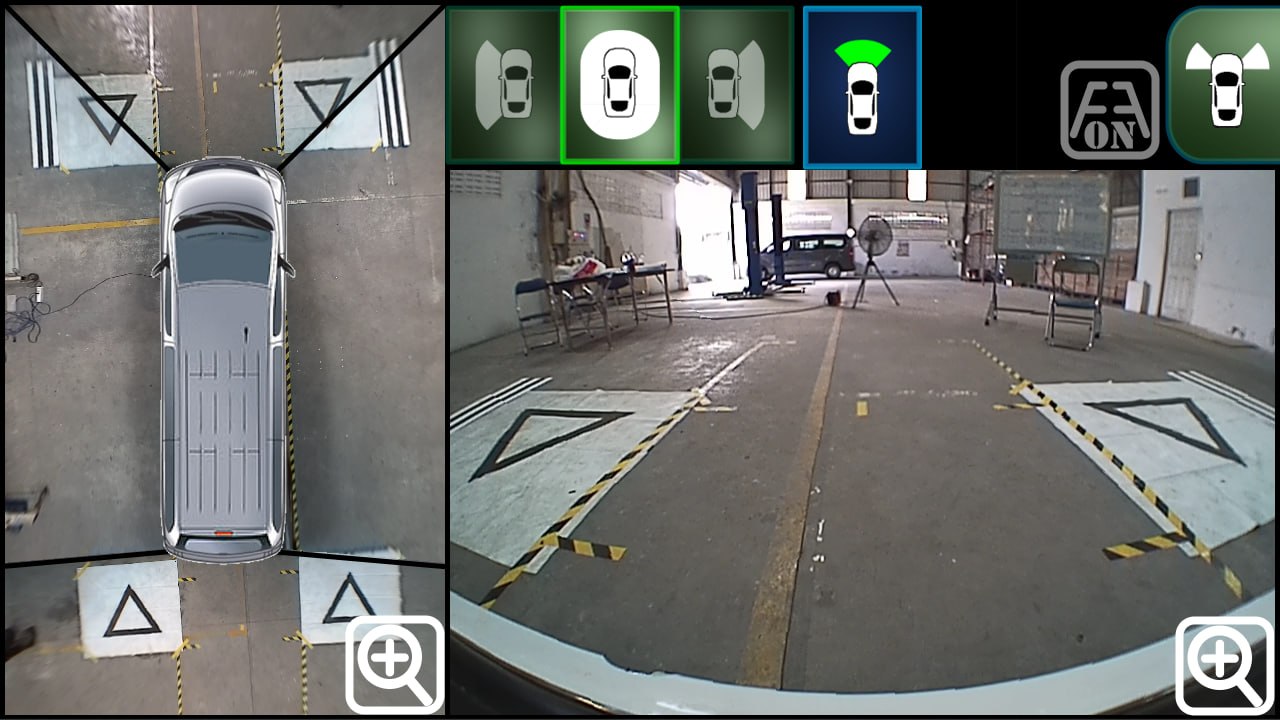
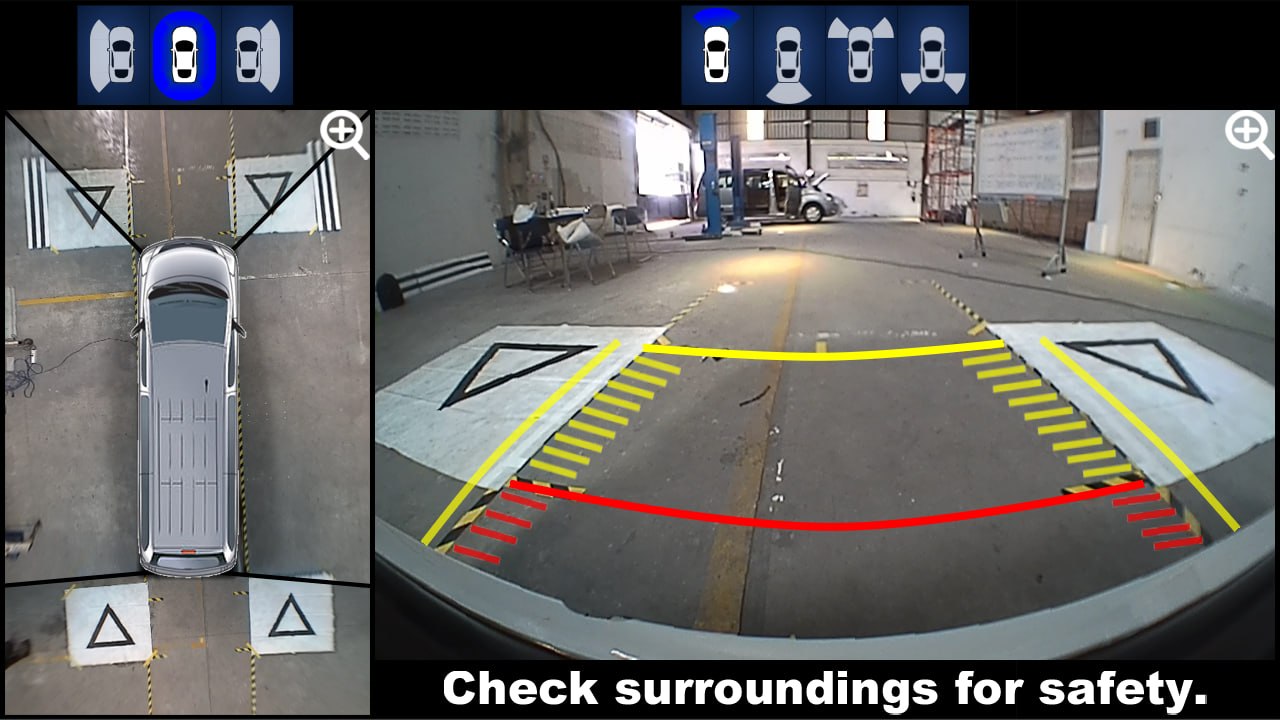
A proprietary 3D Around View Monitoring (3D AVM) system that takes the front, rear, left, and right fisheye-camera images, de-warps and aligns them, then projects and fuses them into a unified 3D model of the vehicle’s surroundings, for perception and automatic parking.
Core techniques include fisheye-camera calibration, image projection and seam stitching, and real-time 3D reconstruction and rendering on embedded platforms (Fujitsu, Nvidia) using OpenCV and OpenGL ES. The system was designed to run on any embedded platform and extended to parking-space detection integrated into automatic-parking products.
The technology shipped through two delivery tracks:
- A Fujitsu-platform version delivered to a Thai car manufacturer, entering its supply chain as a Tier 1, automotive mass-production-grade delivery.
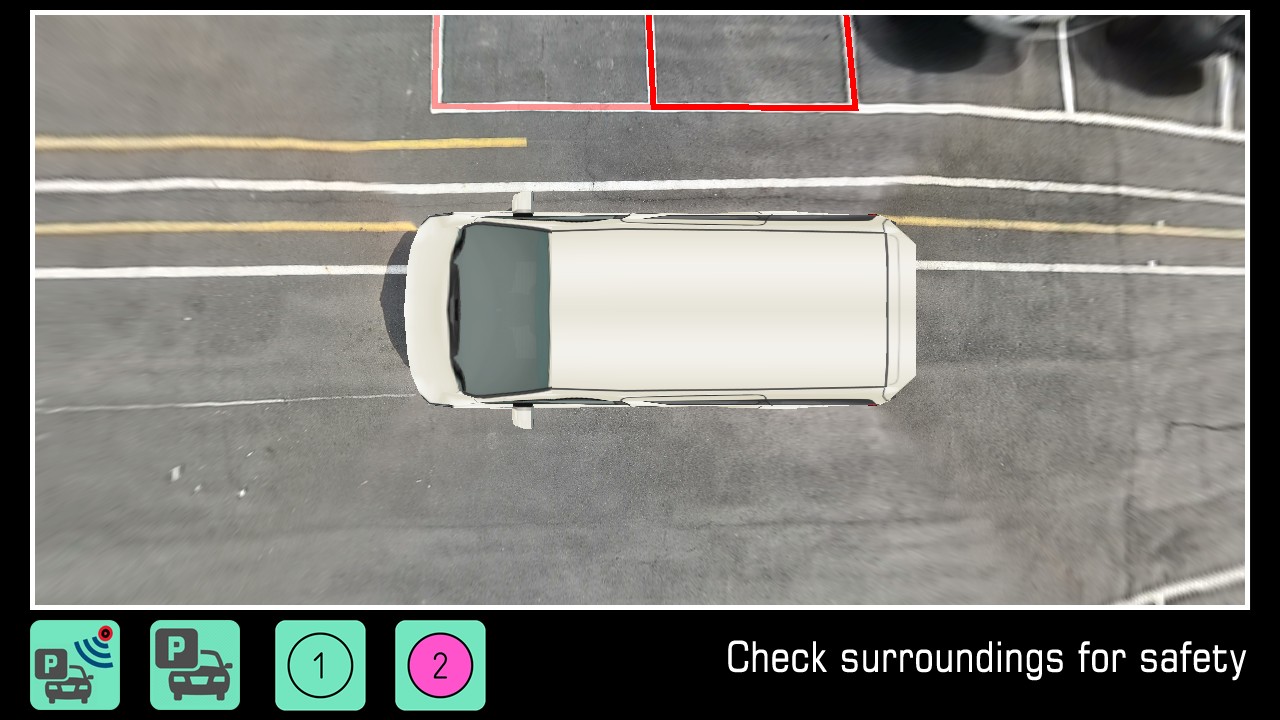
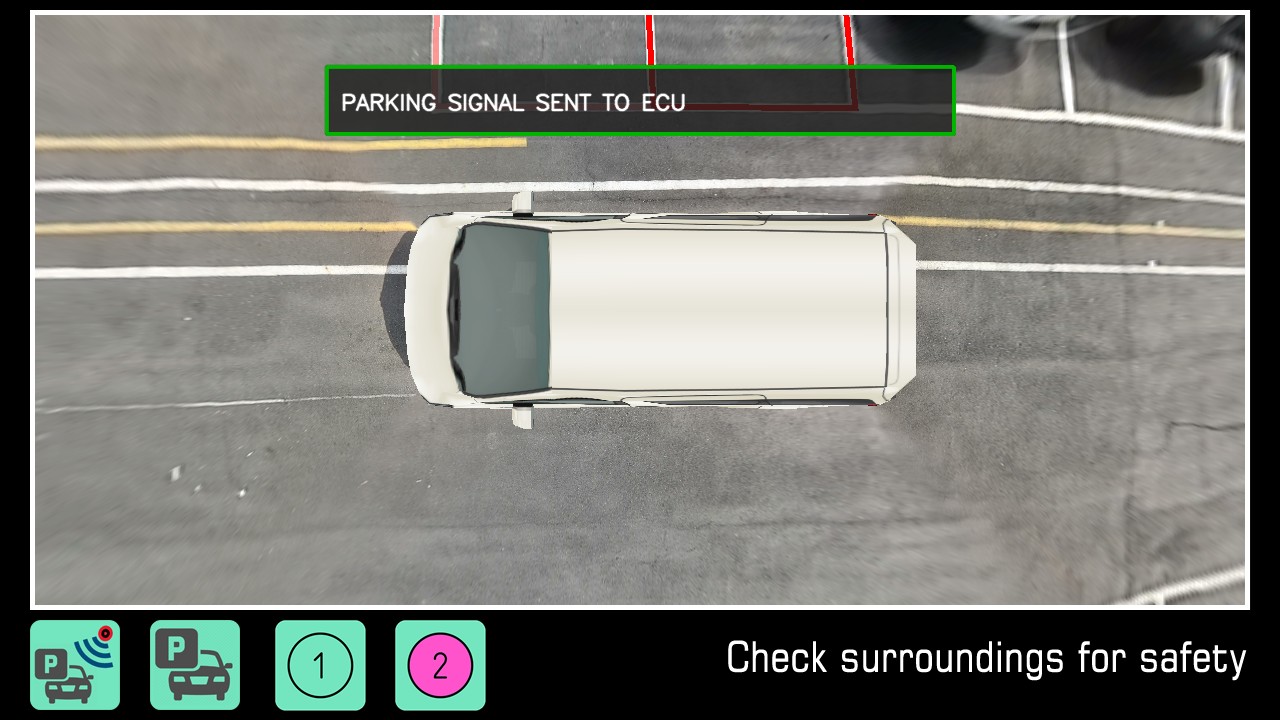
- A self-developed version with Parking-Lot Detection (PLD), flagging available parking spaces on the bird’s-eye view in real time to support automatic parking; this version was handed off via technology transfer to Whetron China (the Suzhou subsidiary), who integrated and delivered it to their end customer.
Together they demonstrate mass-production-grade software delivery that meets strict automotive requirements and transfers cleanly across platforms and teams. (A technical write-up of the self-developed AVM+PLD is linked above; source code is private.)



More projects ←→
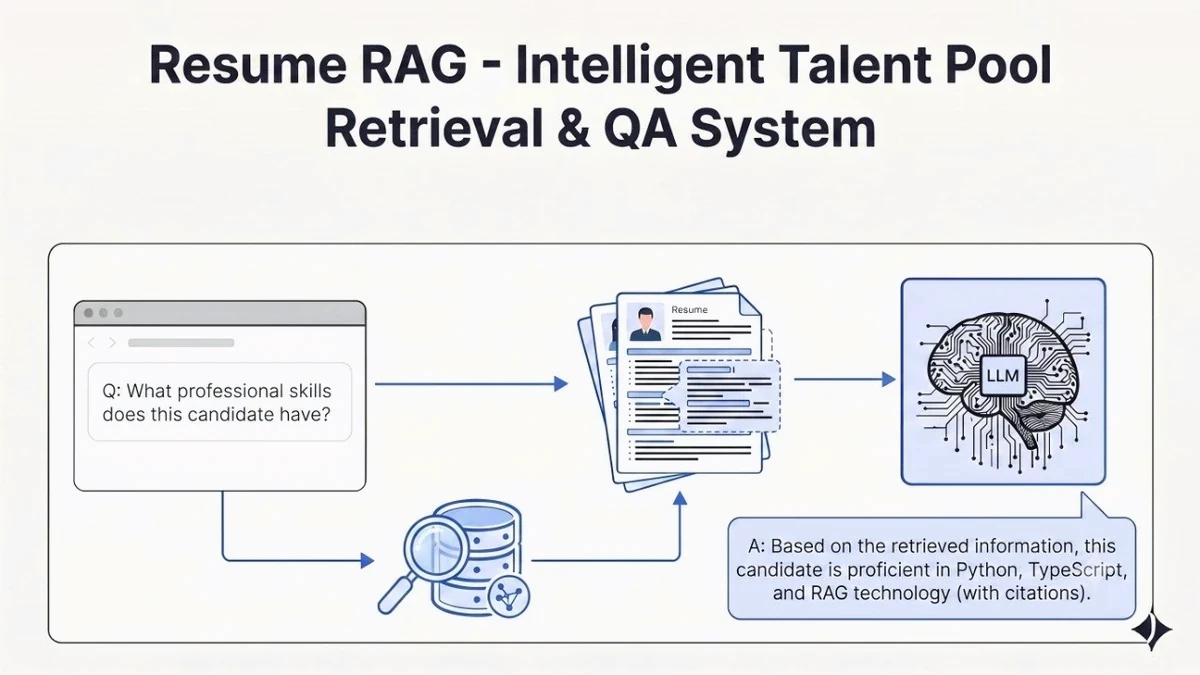
Resume RAG: Ask my resume
- Cloudflare Workers AI
- Vectorize
- bge-m3
- Llama 3.3
- RAG
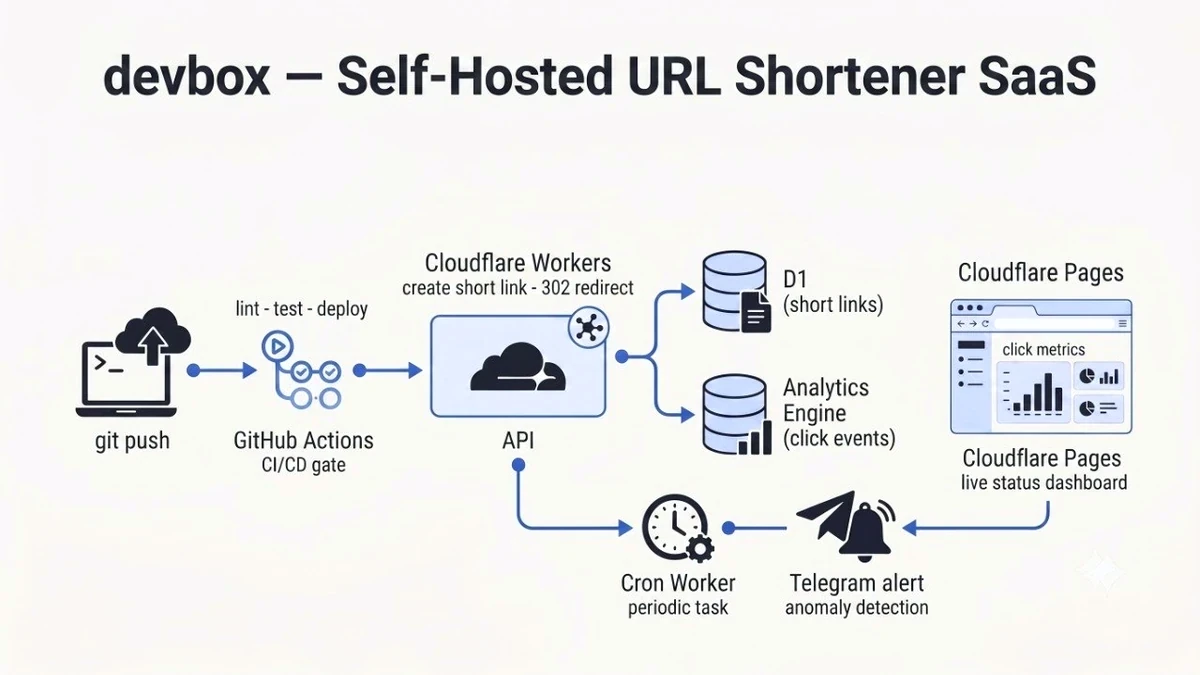
devbox: self-hosted URL-shortener SaaS
- Cloudflare Workers
- D1
- Analytics Engine
- GitHub Actions
- Astro
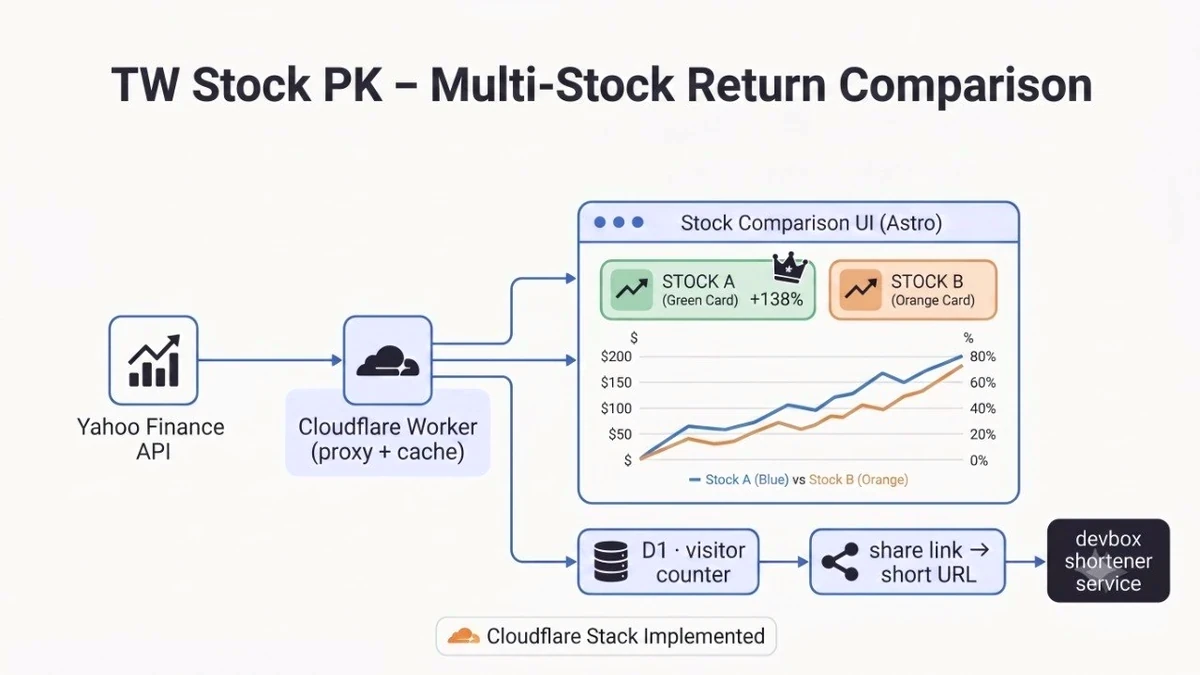
US & TW Stock PK: multi-stock return comparison
- Cloudflare Workers
- Pages
- D1
- Astro
- TypeScript
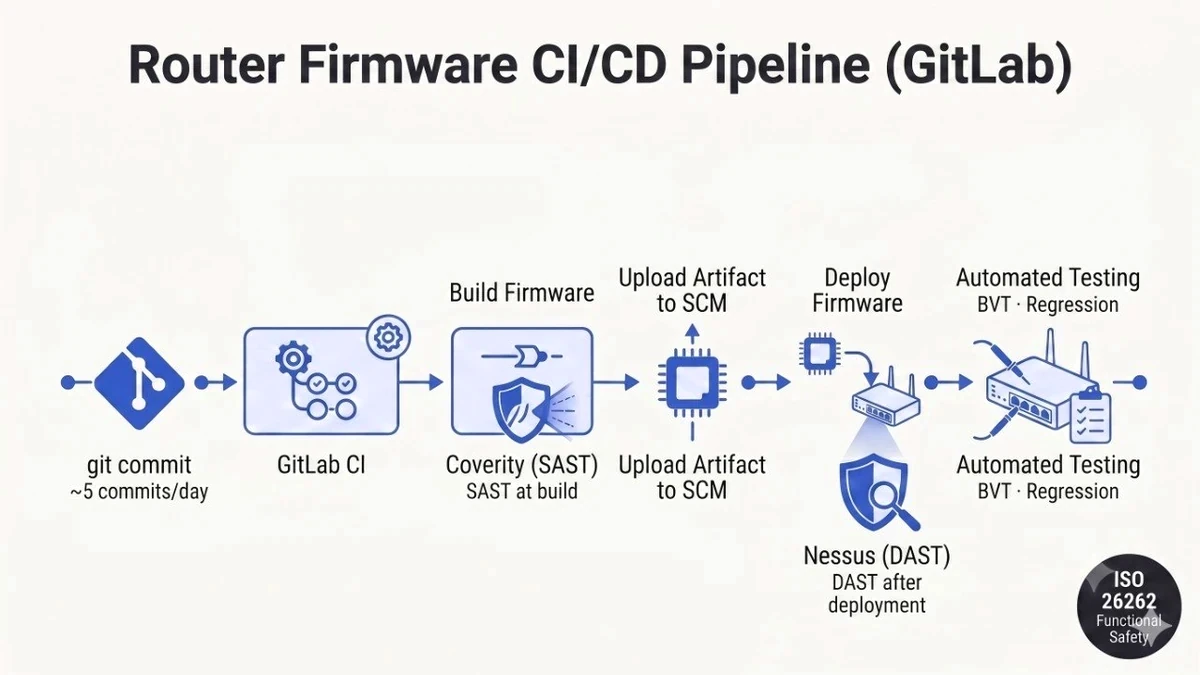
Router Firmware CI/CD Pipeline (GitLab)
- GitLab CI/CD
- ISO 26262
- Coverity
- Nessus
- SAST
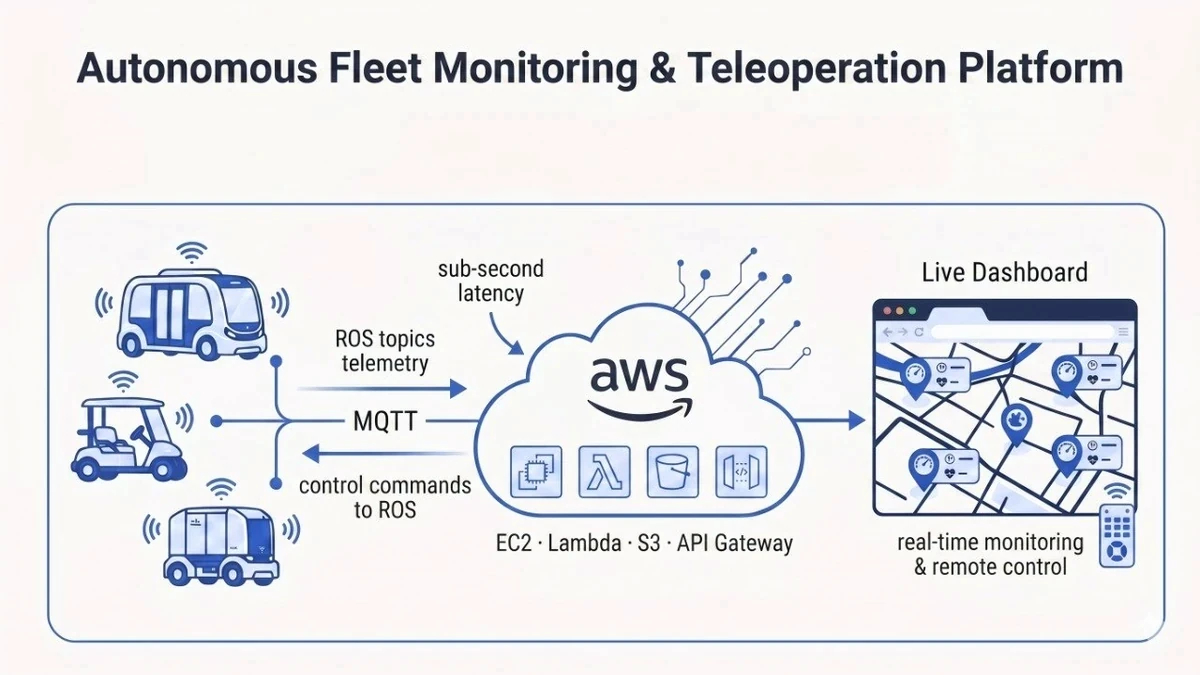
Autonomous Fleet Monitoring & Remote-Control Platform
- AWS
- MQTT
- ROS
- Autoware
- WebSocket
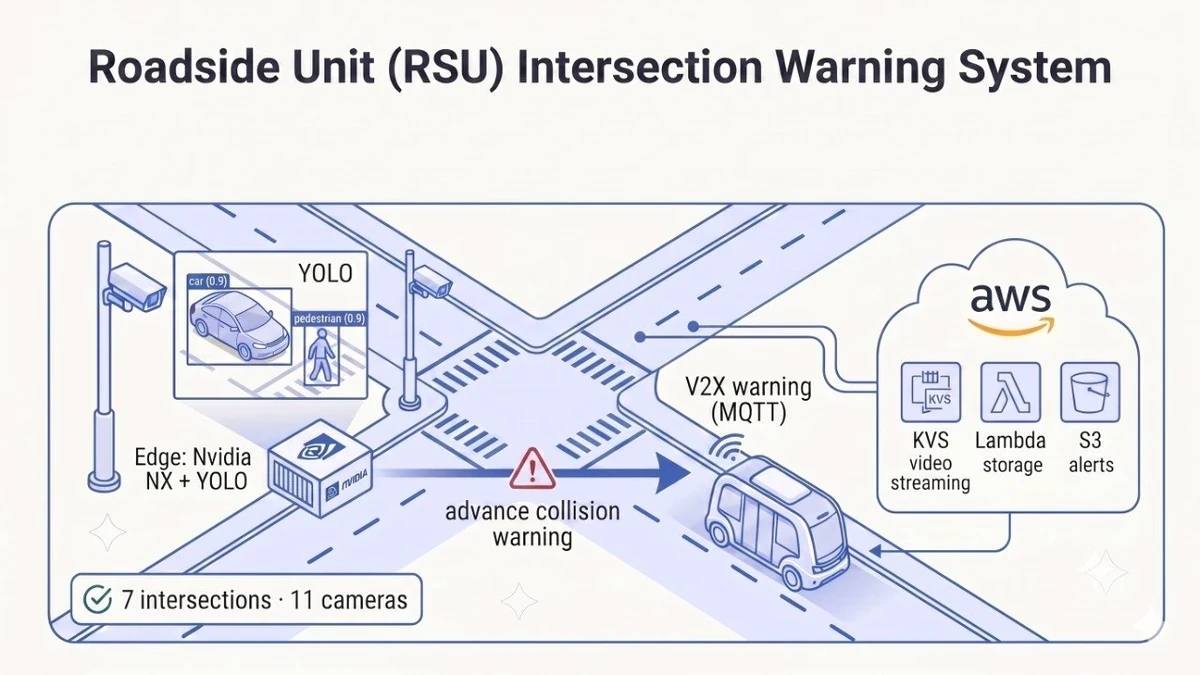
Roadside Unit (RSU) Intersection Warning System
- Nvidia NX
- YOLO
- AWS KVS
- Lambda
- S3
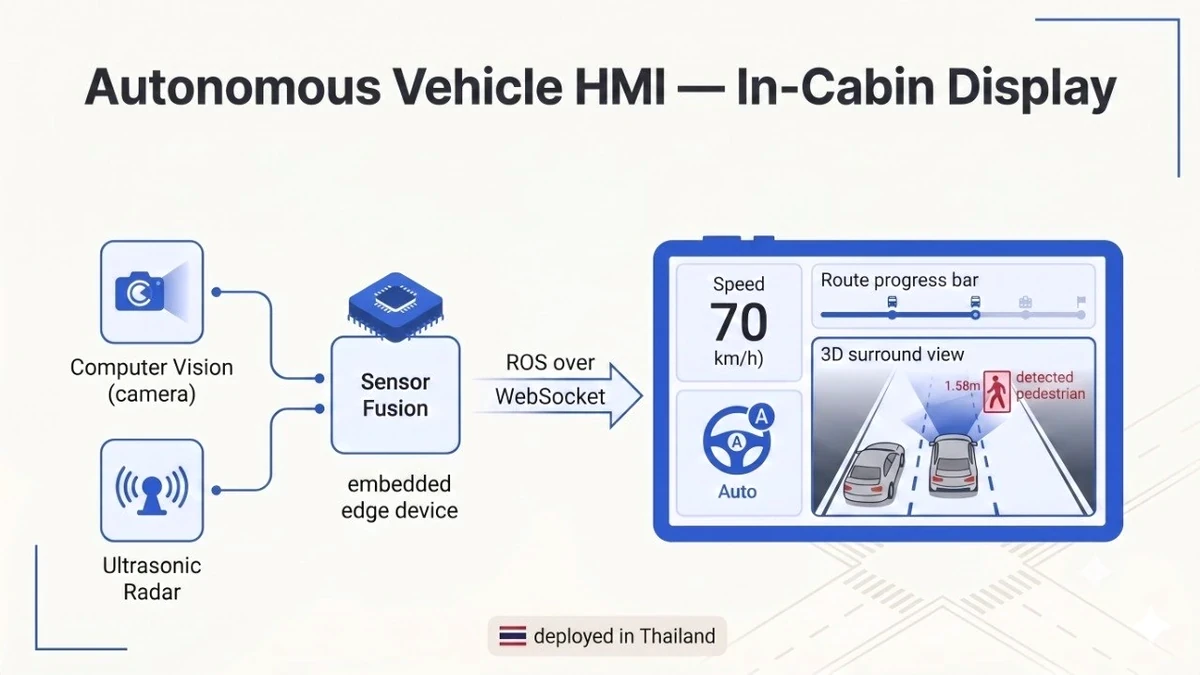
Autonomous Vehicle HMI (Thailand deployment)
- ROS
- WebSocket
- HMI
- Computer Vision
- Ultrasonic Radar