Autonomous Fleet Monitoring & Remote-Control Platform
- AWS
- MQTT
- ROS
- Autoware
- WebSocket
- Node.js
- Vue
- IoT Core
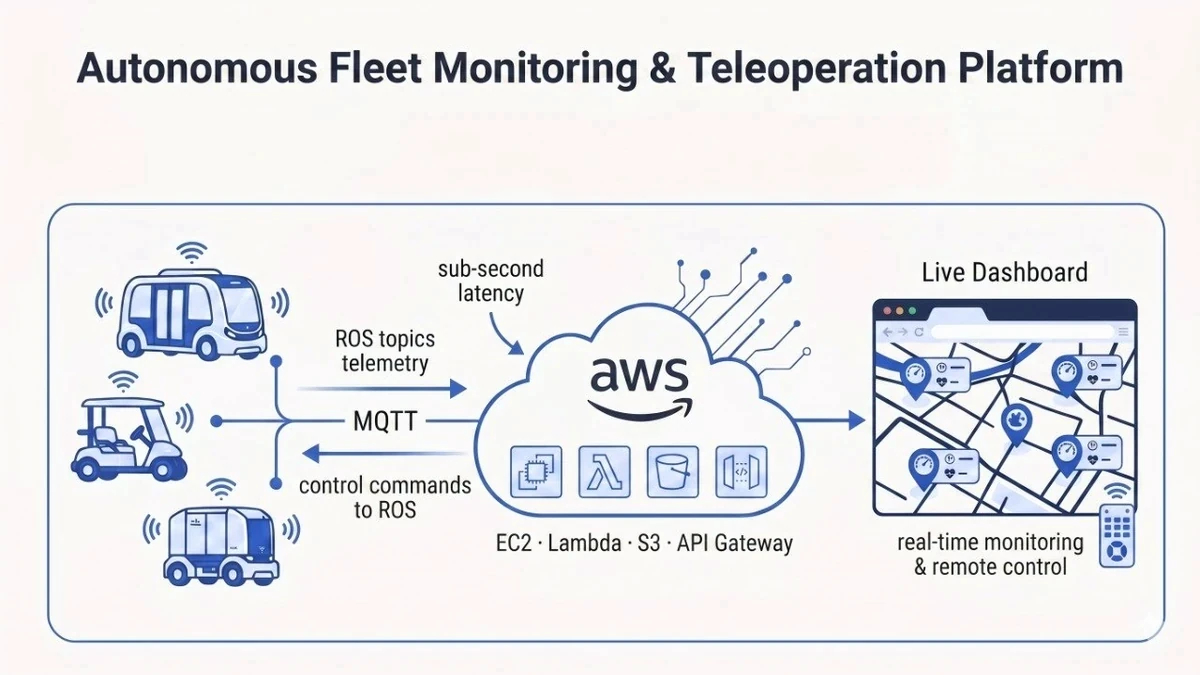
A real-time monitoring and remote-control platform for an autonomous fleet, designed and built from scratch on AWS, integrating 13 autonomous vehicles across 4 types: self-driving shuttles, smart golf carts, and remotely operable vehicles.
The platform subscribes to on-vehicle ROS topics via the AWS IoT SDK and streams to the cloud over MQTT. The path is bidirectional: a user issues a control command in the browser, the system receives the MQTT signal and converts it into a ROS message for the vehicle to execute, at sub-second latency. The backend is composed of EC2 / Lambda / S3 / API Gateway, with a full-stack responsive dashboard for live status, historical analysis, and remote intervention.
I also founded and led the Cloud Operations Team that built the platform’s development workflow, ops standards, and best practices, ensuring scalability and stability.
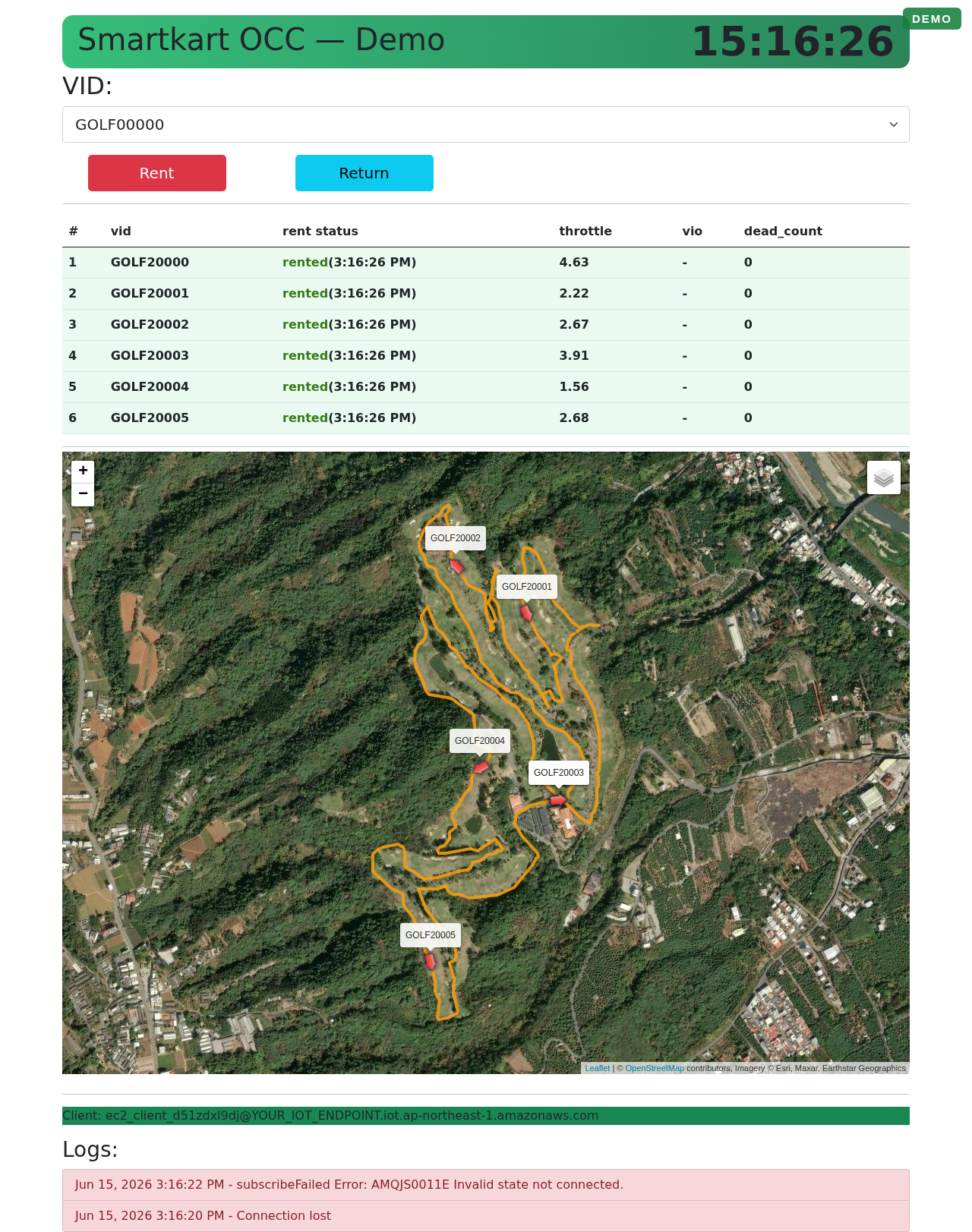
Self-driving golf-cart fleet OCC: live fleet positions on a satellite map, rent/return status, speed and routes.
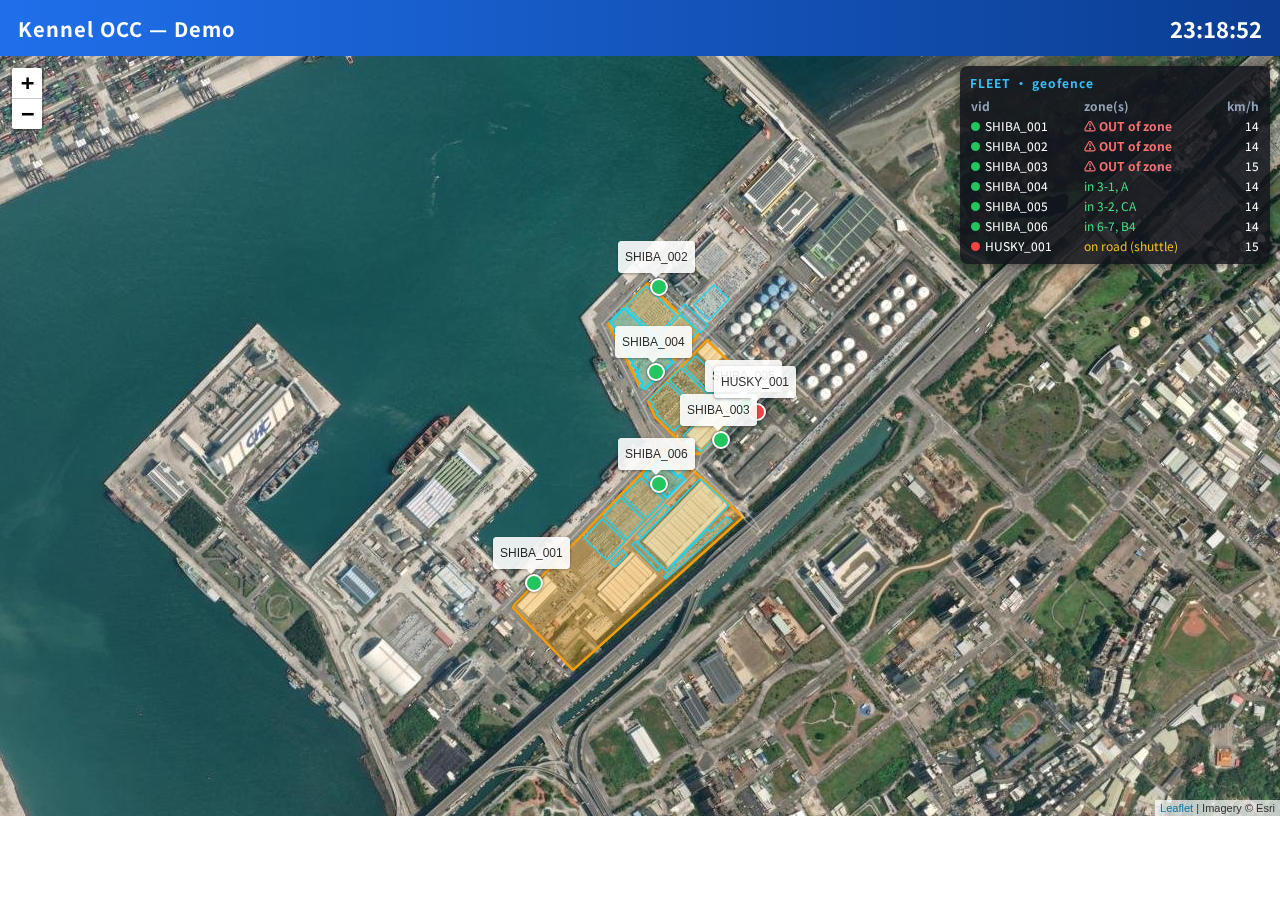
Port AV/work-vehicle fleet OCC: live positions + geofence-zone monitoring (point-in-polygon: which zone a vehicle is in / whether it left), vehicles driving the port roads.
Autonomous patrol/mission vehicle OCC: plan a start→goal route, navigate to a target stop point, live trajectory and remote commands.

More projects ←→
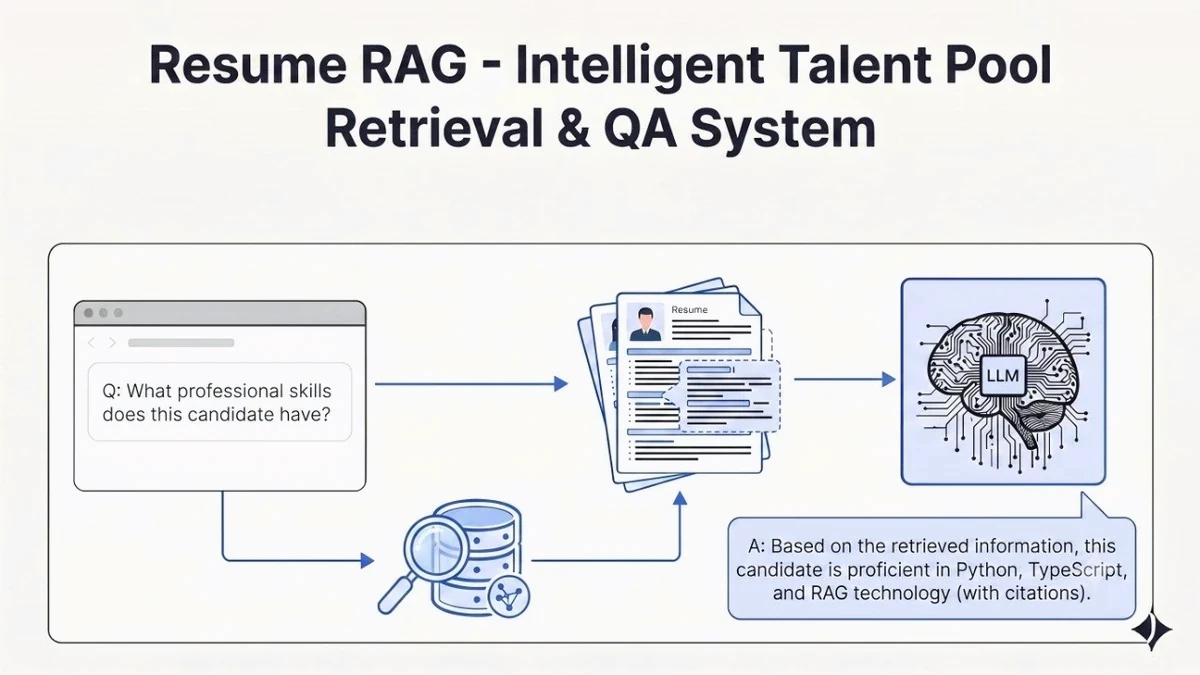
Resume RAG: Ask my resume
- Cloudflare Workers AI
- Vectorize
- bge-m3
- Llama 3.3
- RAG
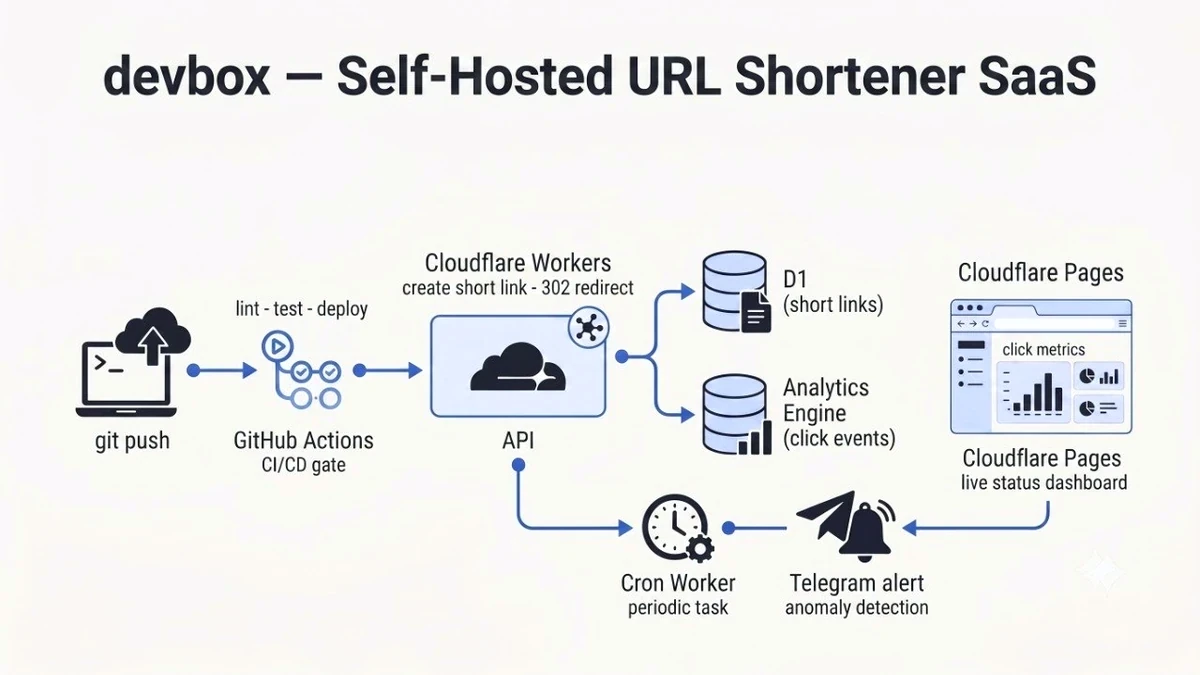
devbox: self-hosted URL-shortener SaaS
- Cloudflare Workers
- D1
- Analytics Engine
- GitHub Actions
- Astro
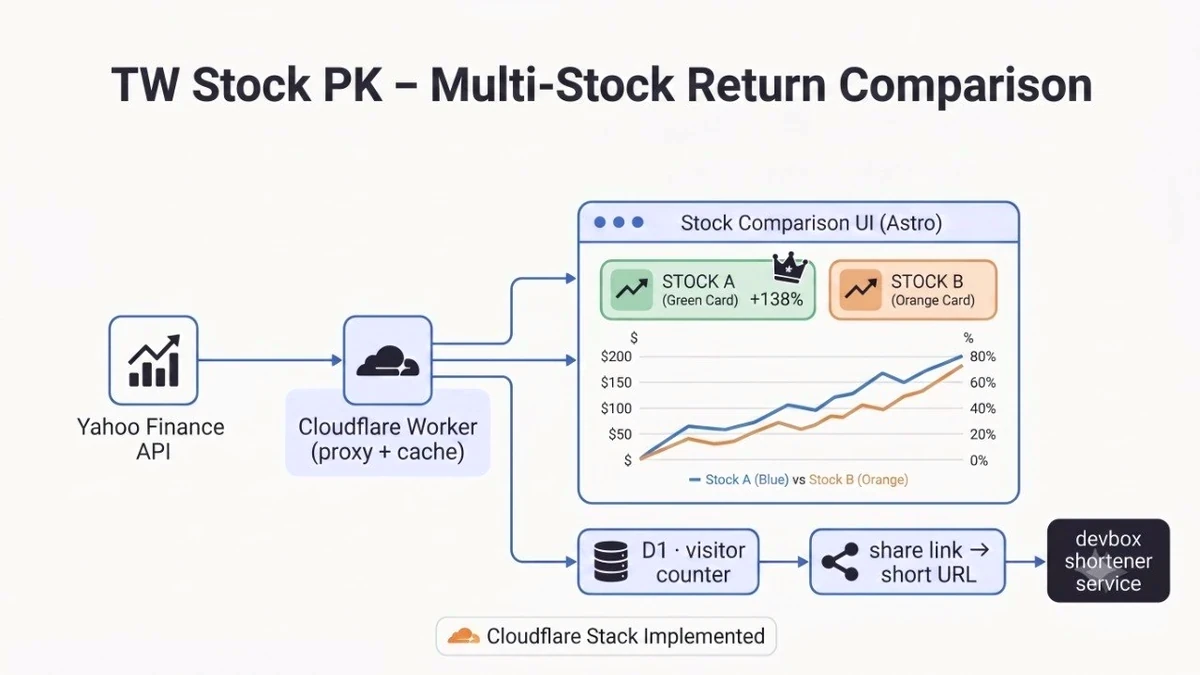
US & TW Stock PK: multi-stock return comparison
- Cloudflare Workers
- Pages
- D1
- Astro
- TypeScript
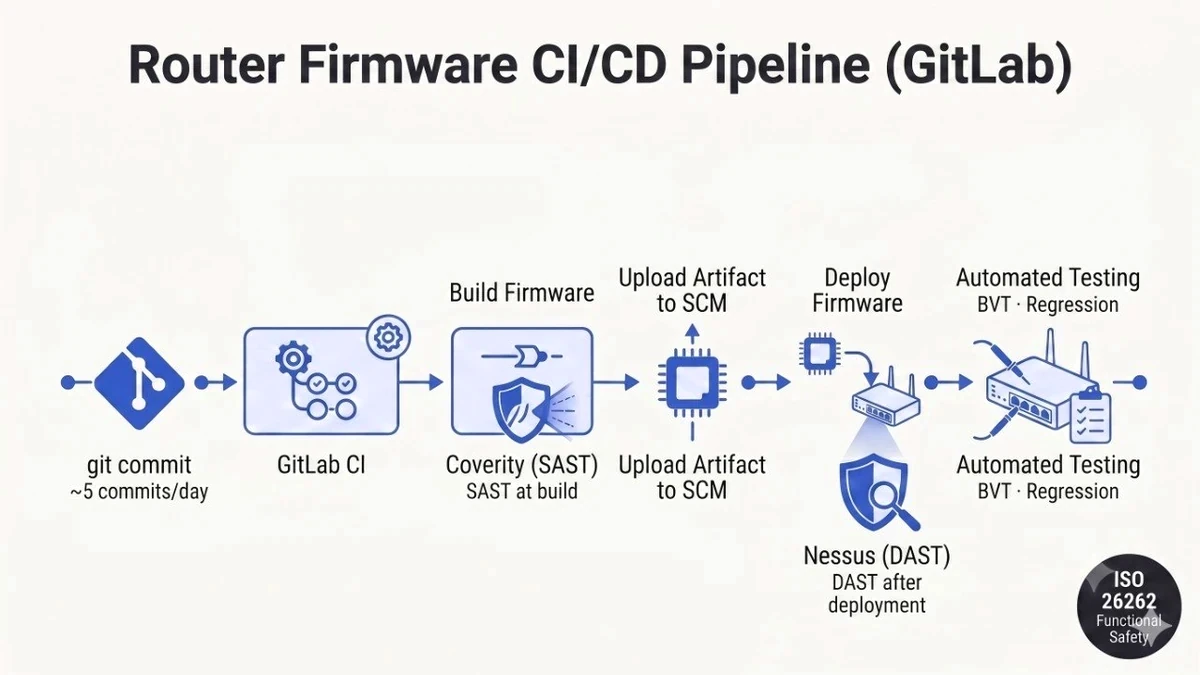
Router Firmware CI/CD Pipeline (GitLab)
- GitLab CI/CD
- ISO 26262
- Coverity
- Nessus
- SAST
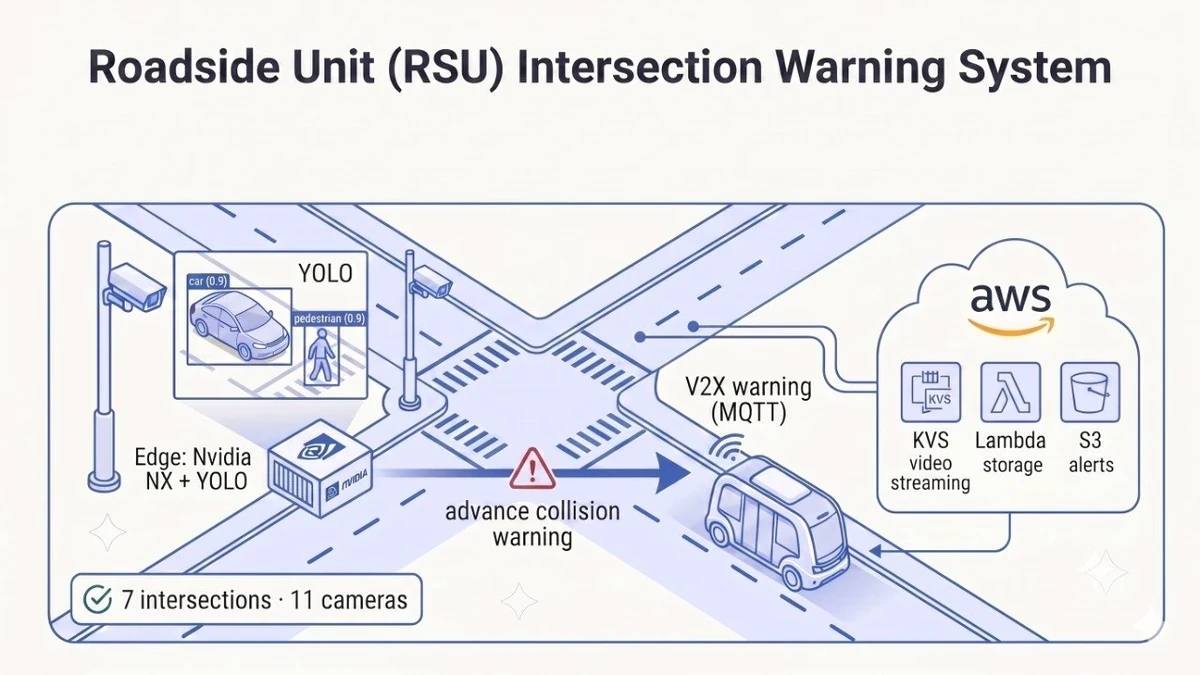
Roadside Unit (RSU) Intersection Warning System
- Nvidia NX
- YOLO
- AWS KVS
- Lambda
- S3
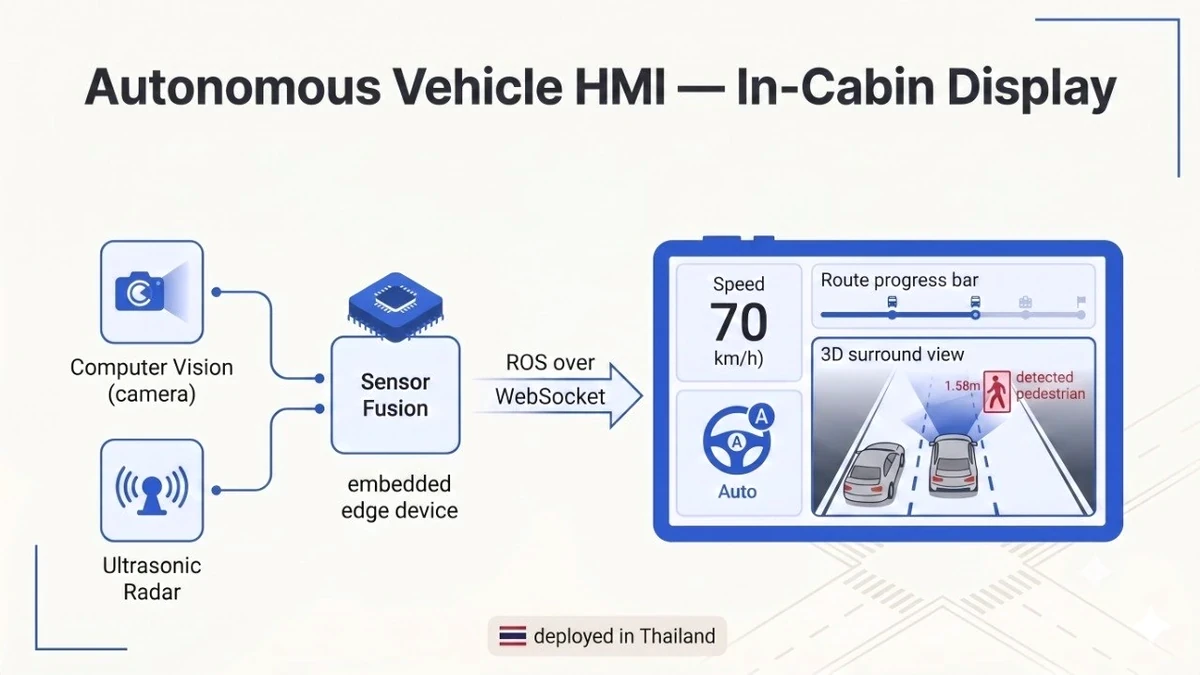
Autonomous Vehicle HMI (Thailand deployment)
- ROS
- WebSocket
- HMI
- Computer Vision
- Ultrasonic Radar
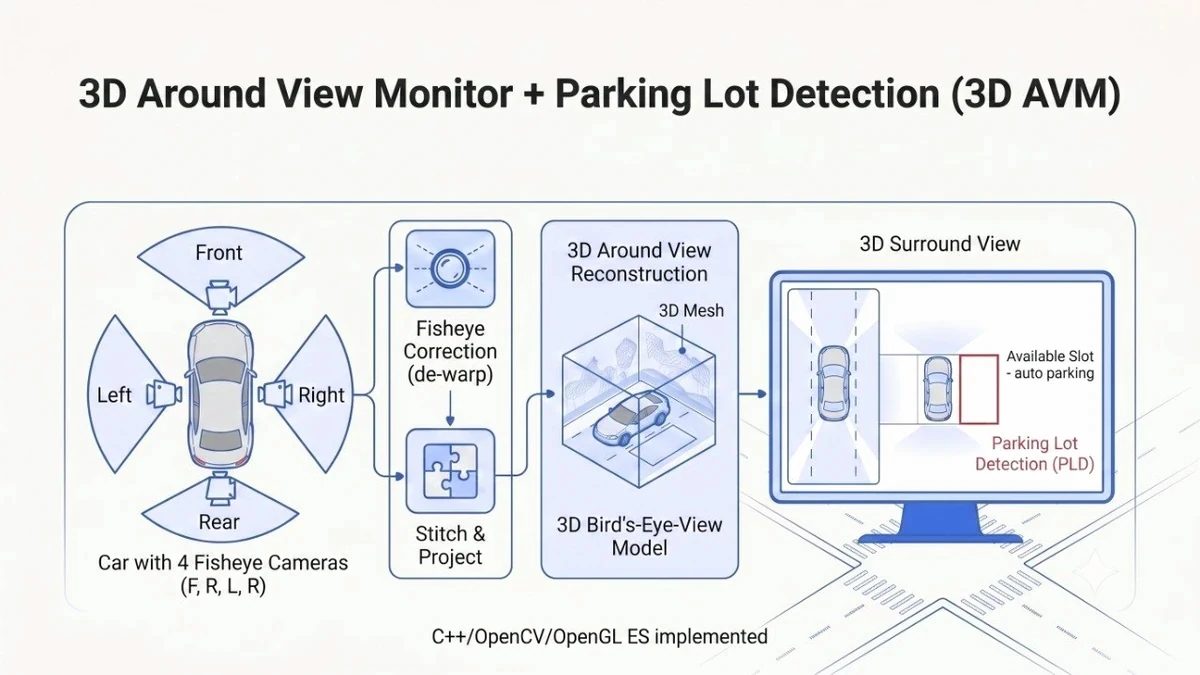
3D Around View Monitoring + Parking Detection (3D AVM)
- OpenCV
- OpenGL ES
- 3D Reconstruction
- Fisheye Calibration
- C++