Roadside Unit (RSU) Intersection Warning System
- Nvidia NX
- YOLO
- AWS KVS
- Lambda
- S3
- MQTT
- V2X
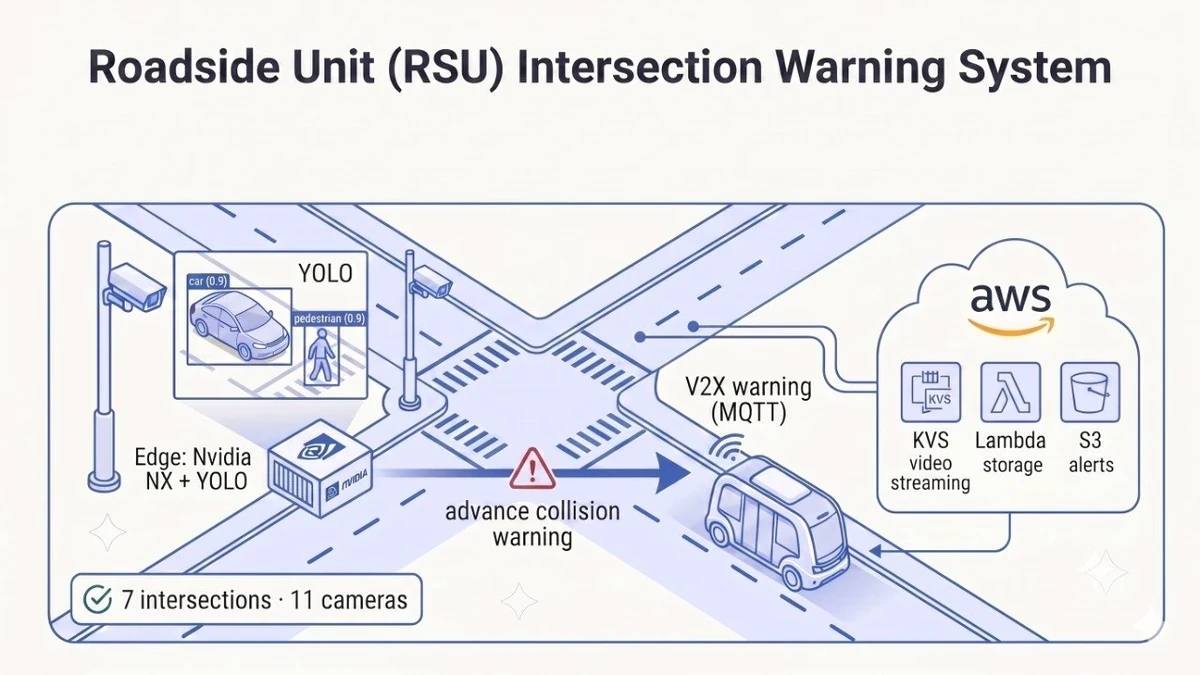
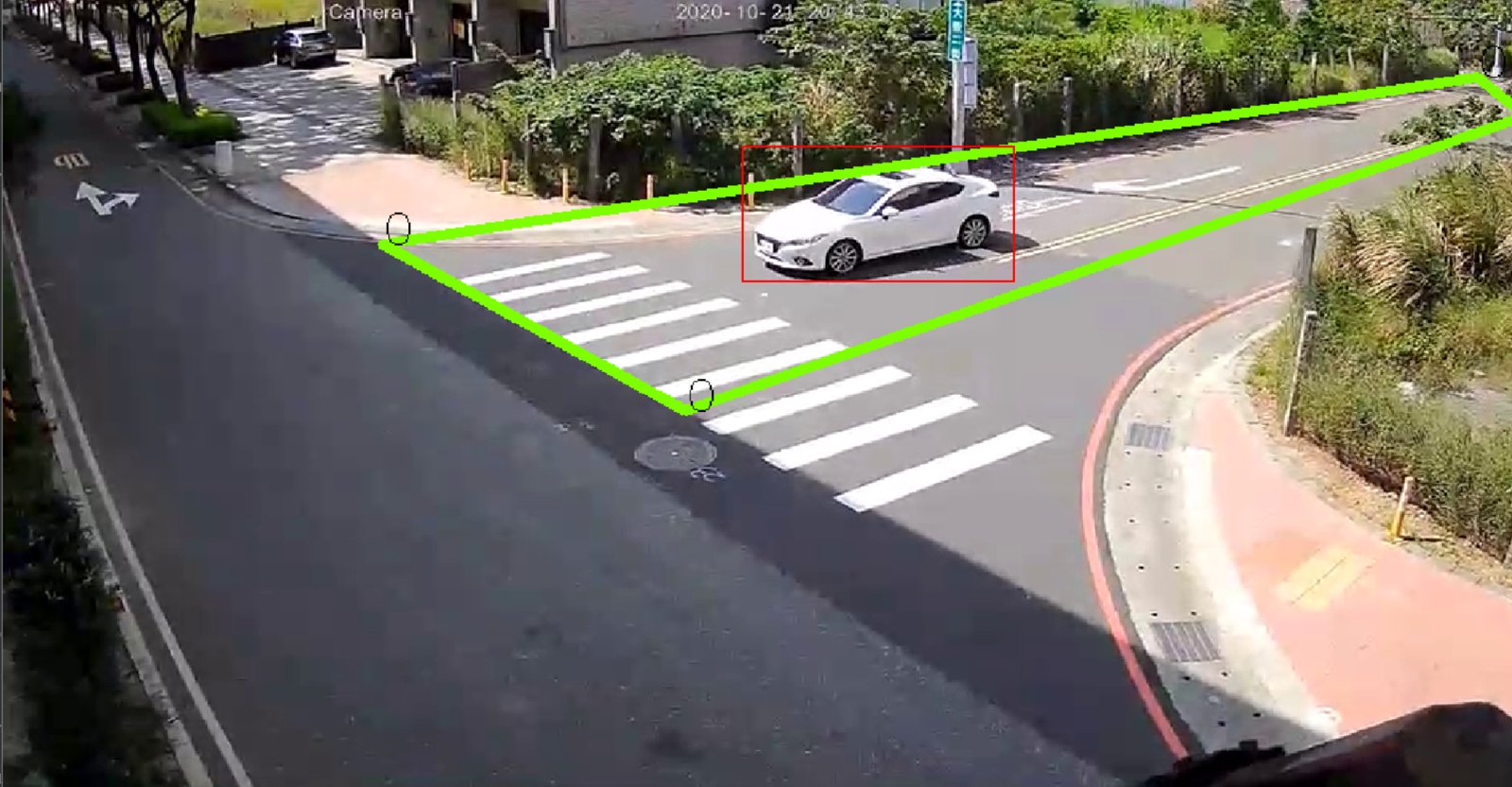
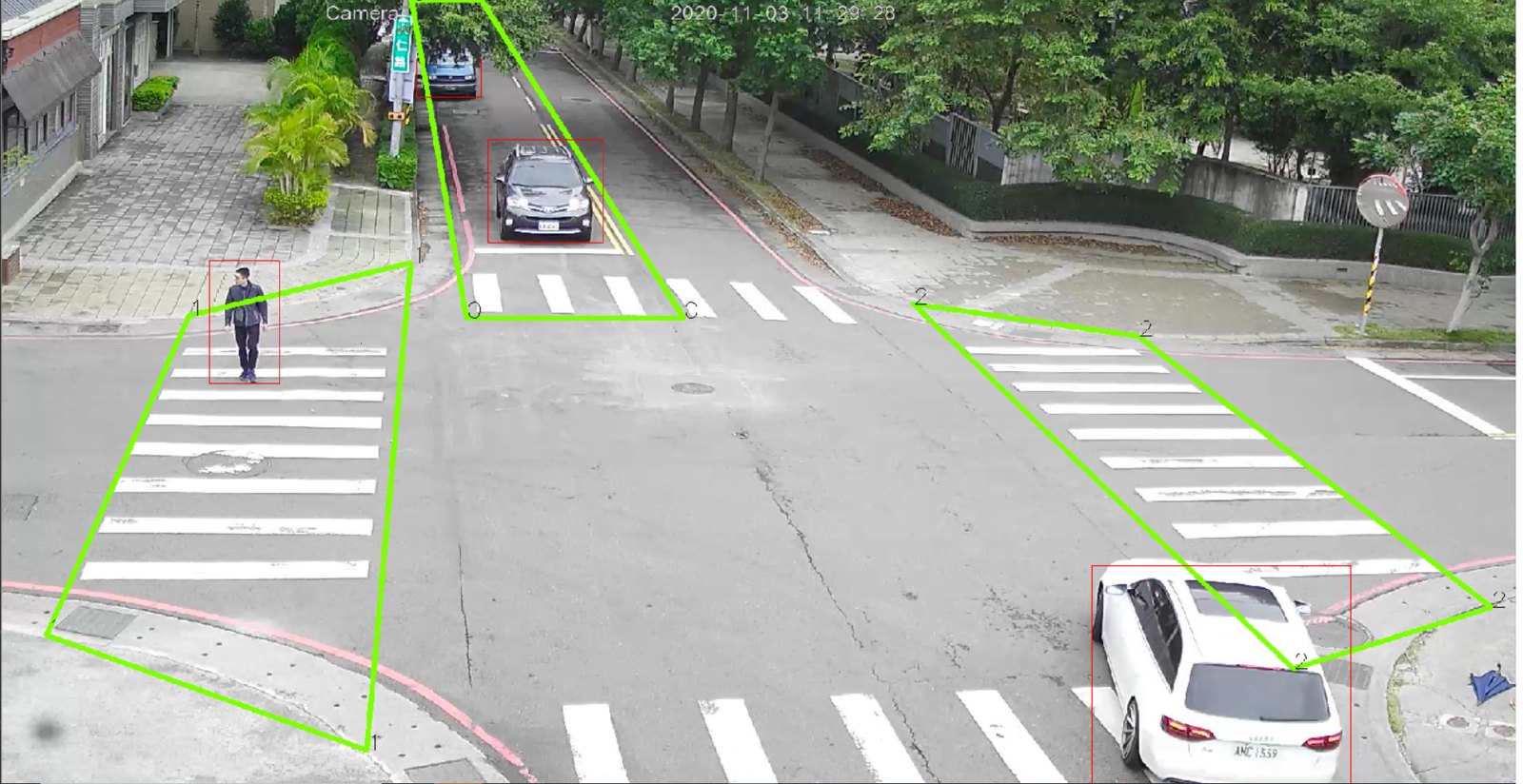
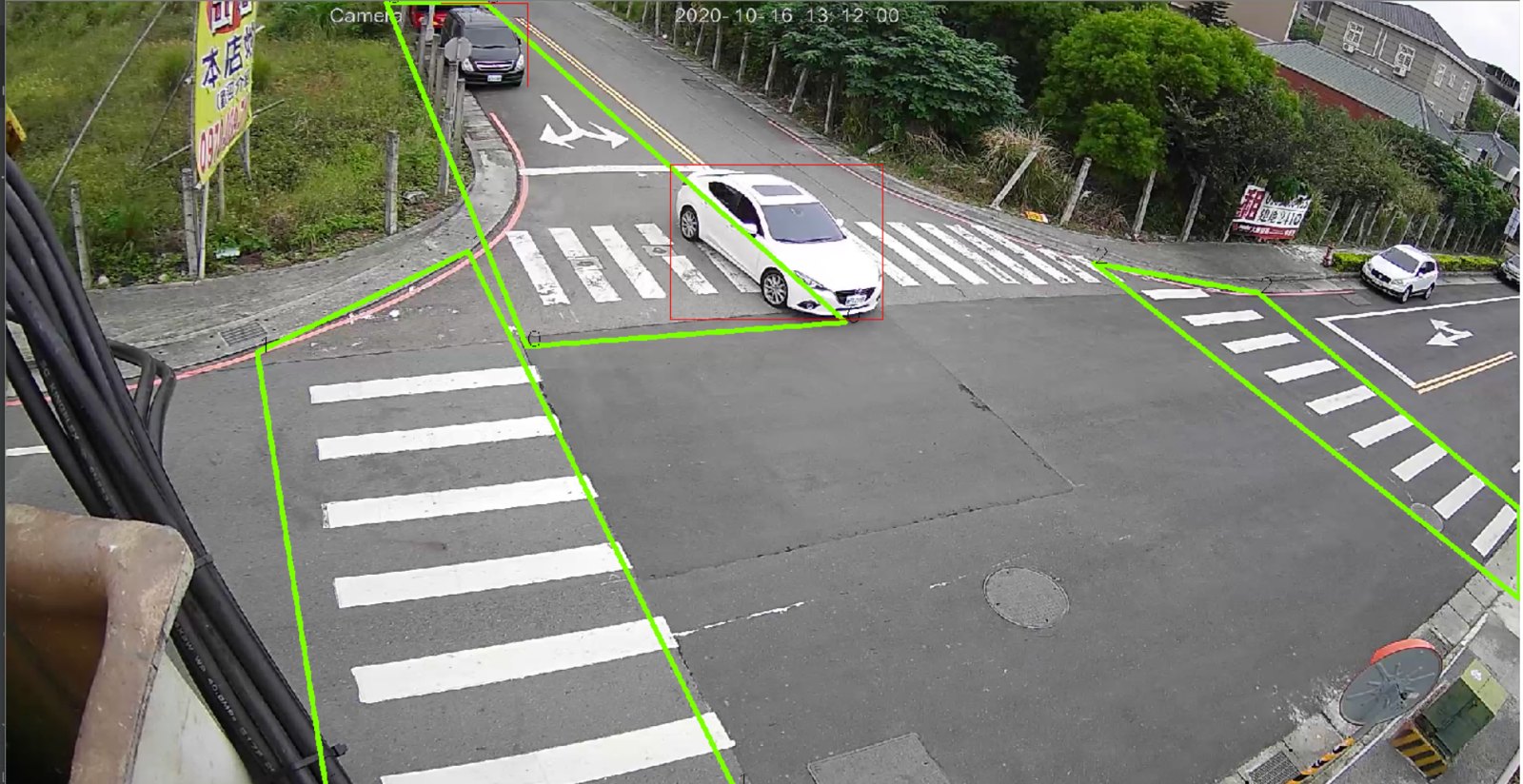
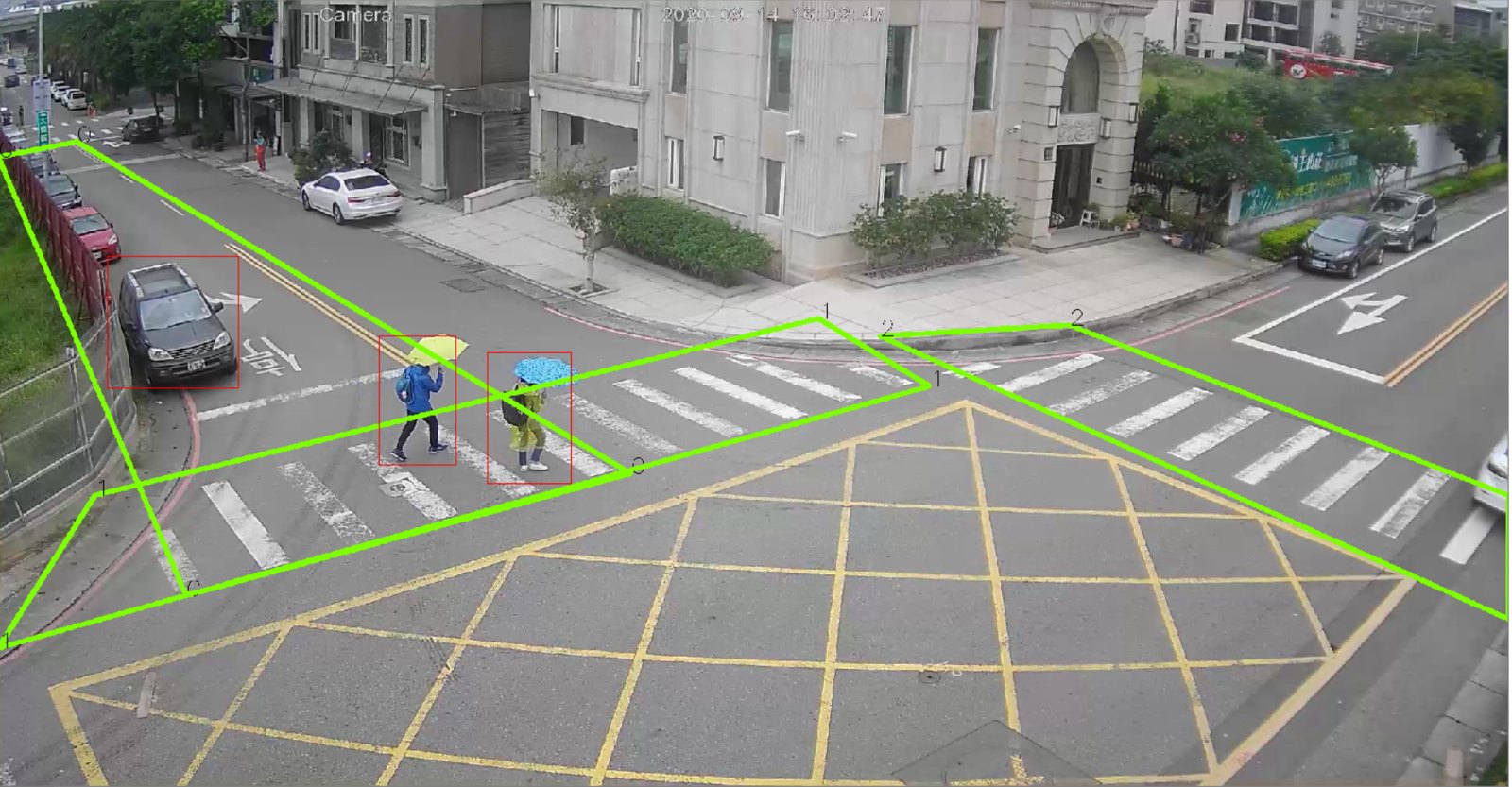
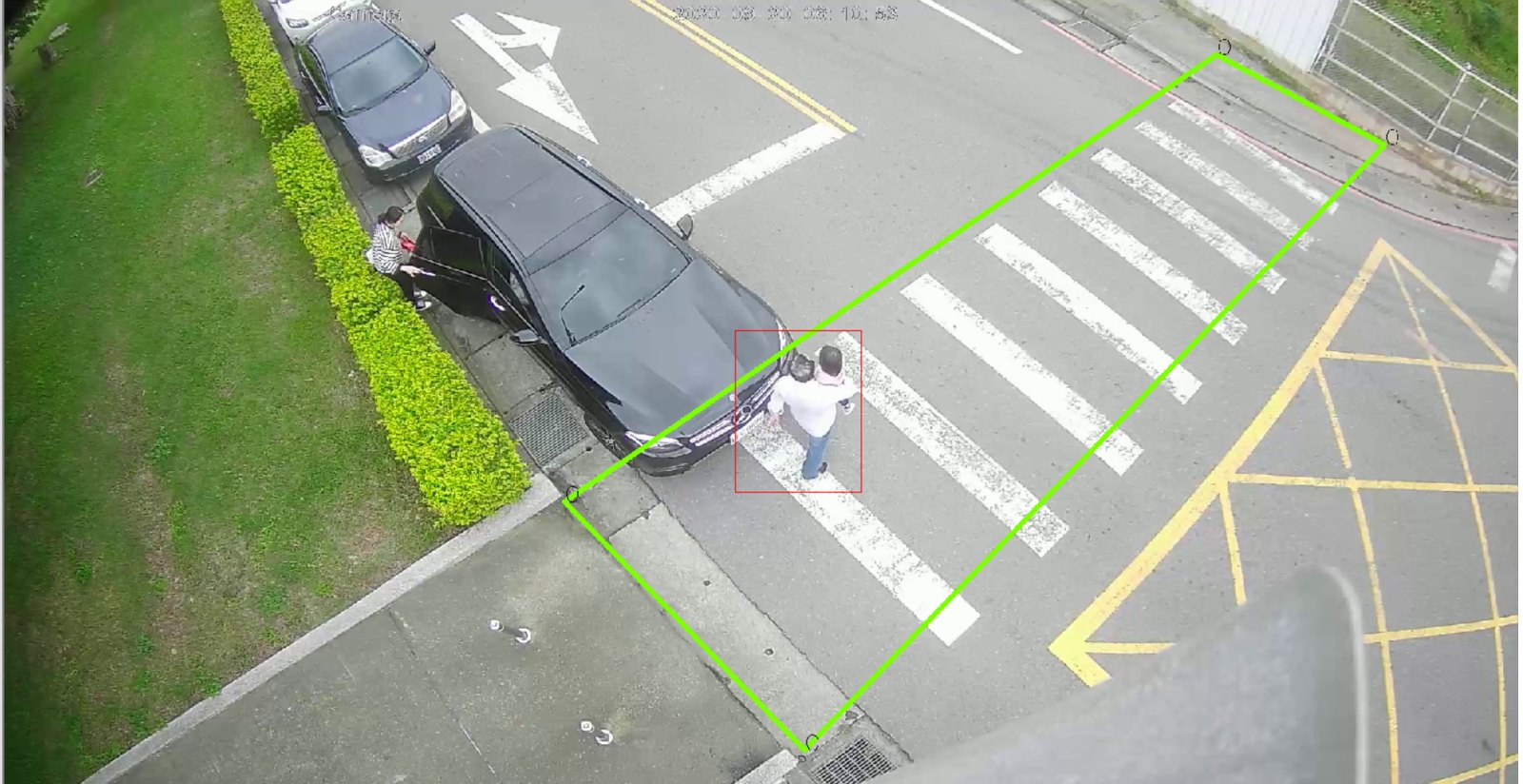
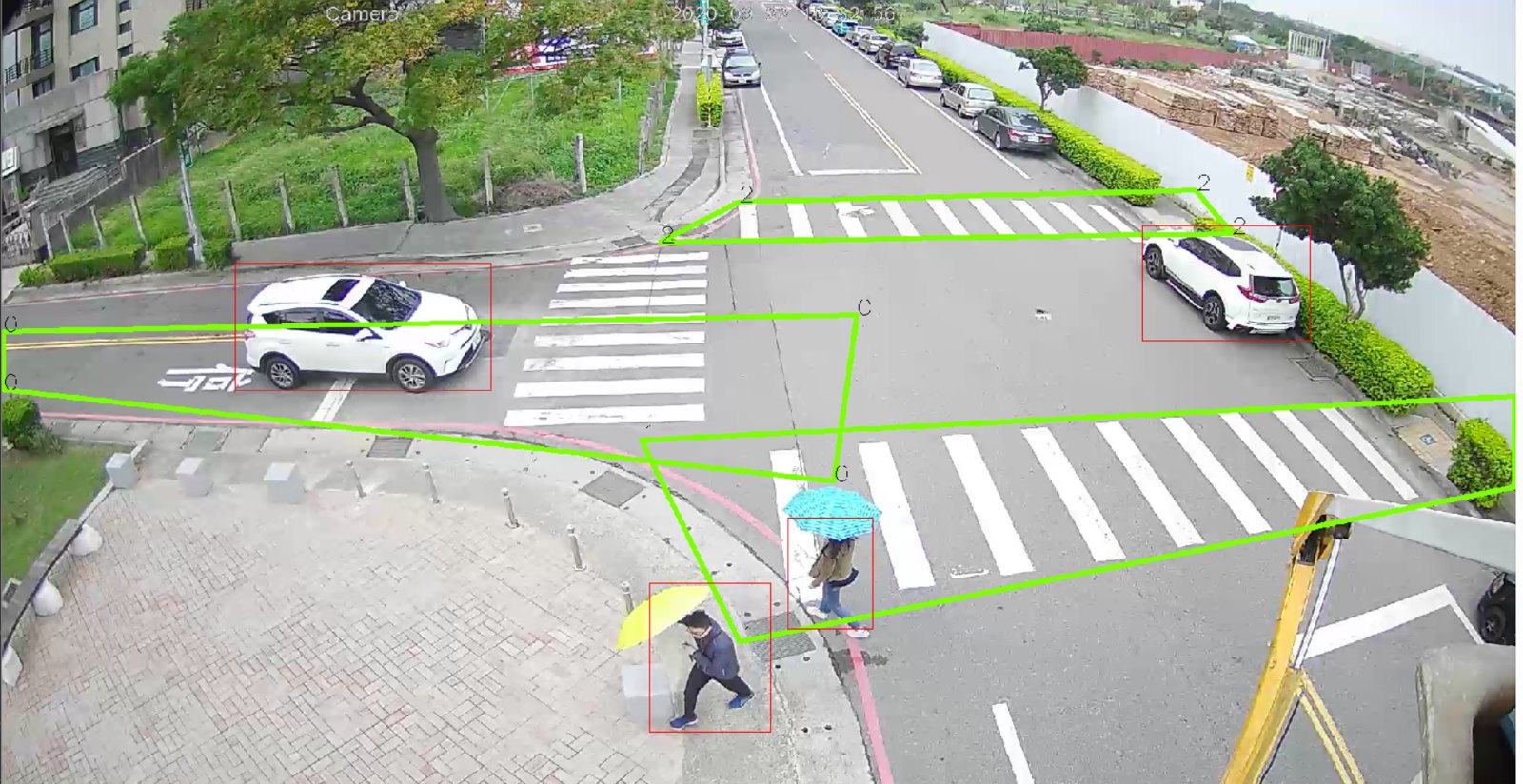
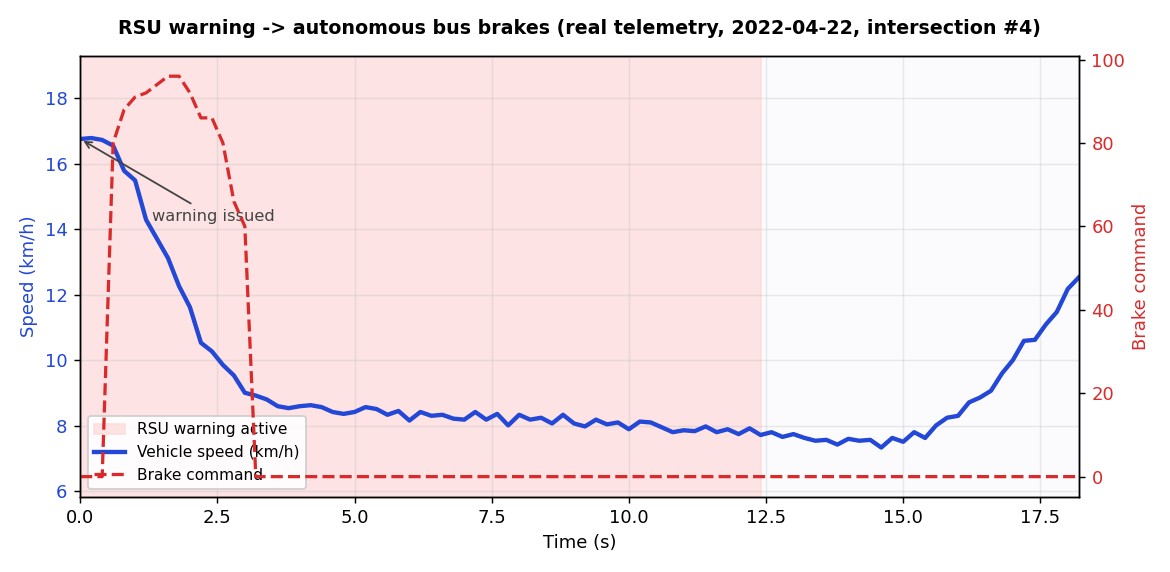
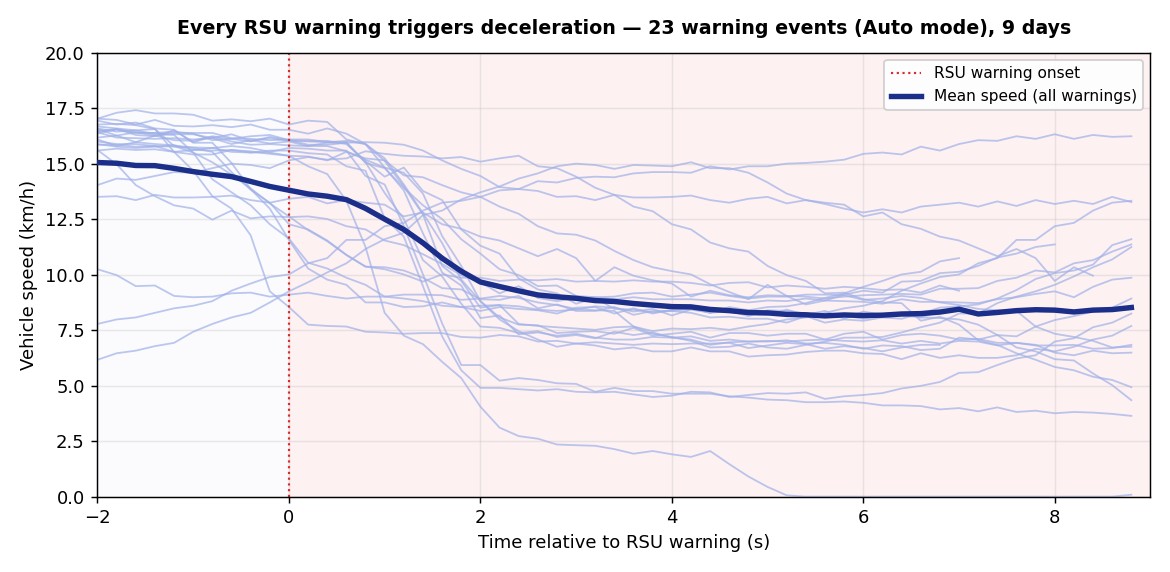
A safety solution for autonomous vehicles at unsignalized intersections. A Roadside Unit (RSU) mounted at the intersection runs YOLO on an Nvidia NX edge platform to detect oncoming vehicles and pedestrians in real time, marks detection zones, assesses collision risk, and transmits alerts to self-driving cars over MQTT (V2X) for early collision avoidance.
On the cloud side, AWS KVS / Lambda / S3 form the video-streaming, storage, and alert-management services, designed for low latency and high reliability. I served as technical lead, coordinating the algorithm, embedded, and cloud teams to deliver reliably.
Scale & results: deployed for the Taoyuan Qingpu Autonomous Bus pilot (Taiwan’s first autonomous bus line offering MRT-station connection and reaching into communities):
- Roadside system covered 7 intersections with 11 cameras, guarding complex mixed-traffic junctions in real time.
- 2021 trial run (weekdays 10:00–15:40, ~20-min headway) carried 1,000+ passengers with 90%+ rider satisfaction.
- An estimated ~1,000 trips; at 1–2 intersection alerts per trip, that is roughly 1,000–2,000 advance warnings delivered to the autonomous bus.

More projects ←→
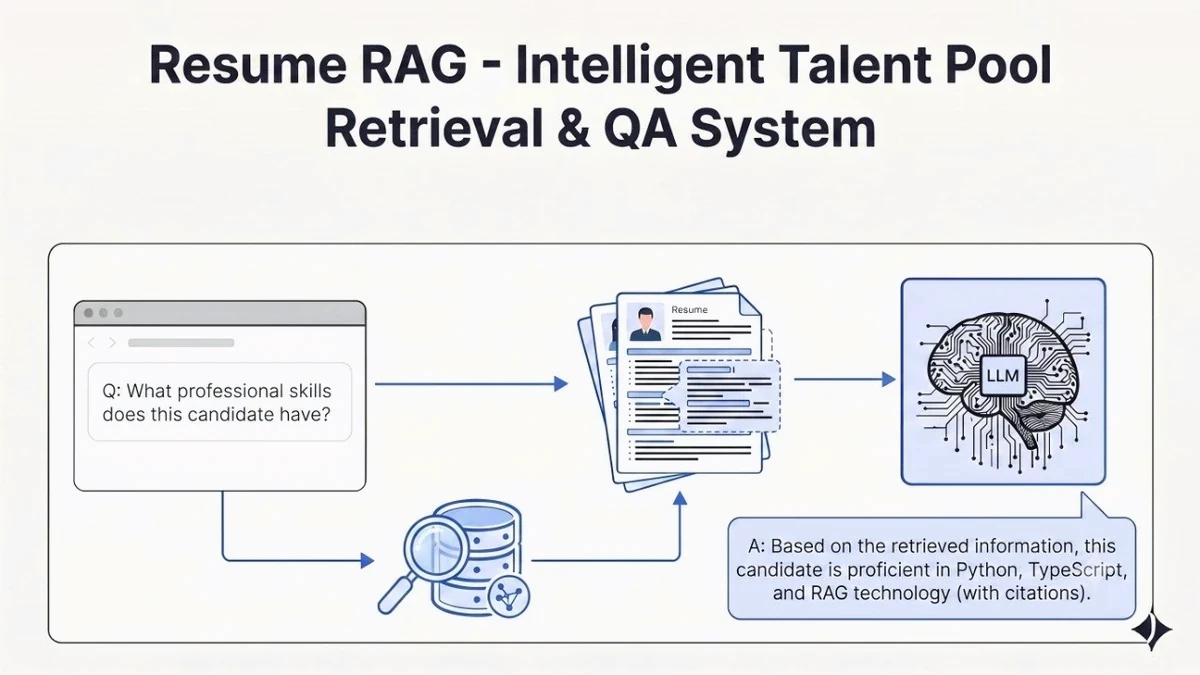
Resume RAG: Ask my resume
- Cloudflare Workers AI
- Vectorize
- bge-m3
- Llama 3.3
- RAG
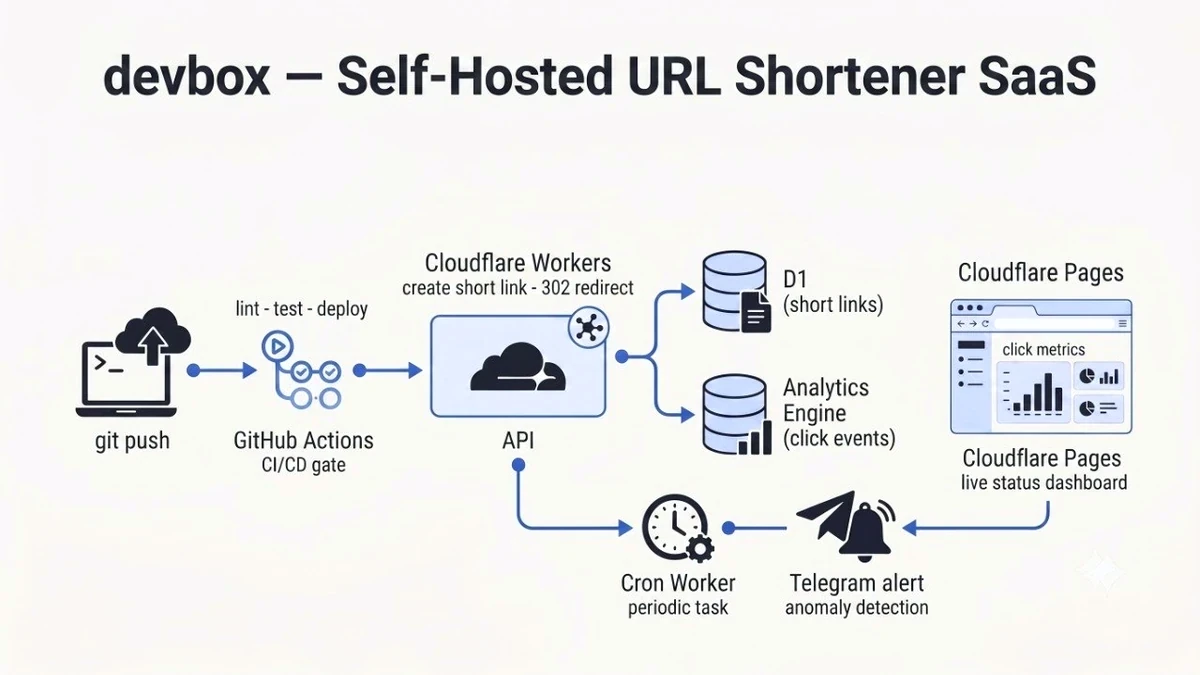
devbox: self-hosted URL-shortener SaaS
- Cloudflare Workers
- D1
- Analytics Engine
- GitHub Actions
- Astro
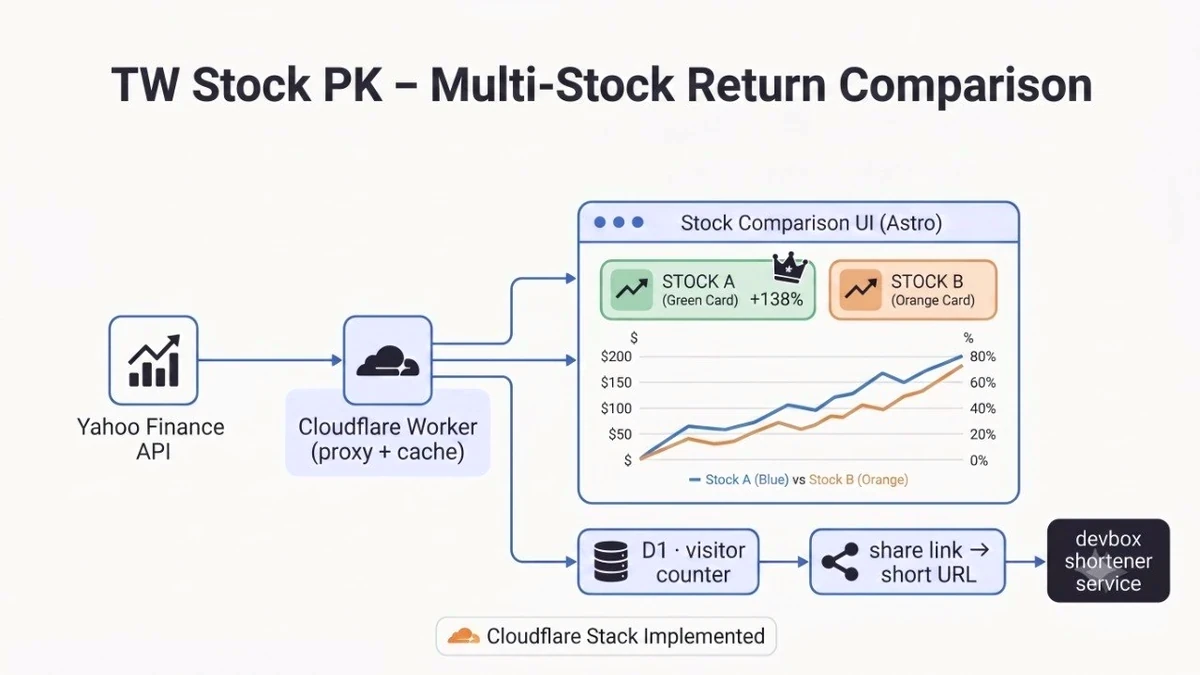
US & TW Stock PK: multi-stock return comparison
- Cloudflare Workers
- Pages
- D1
- Astro
- TypeScript
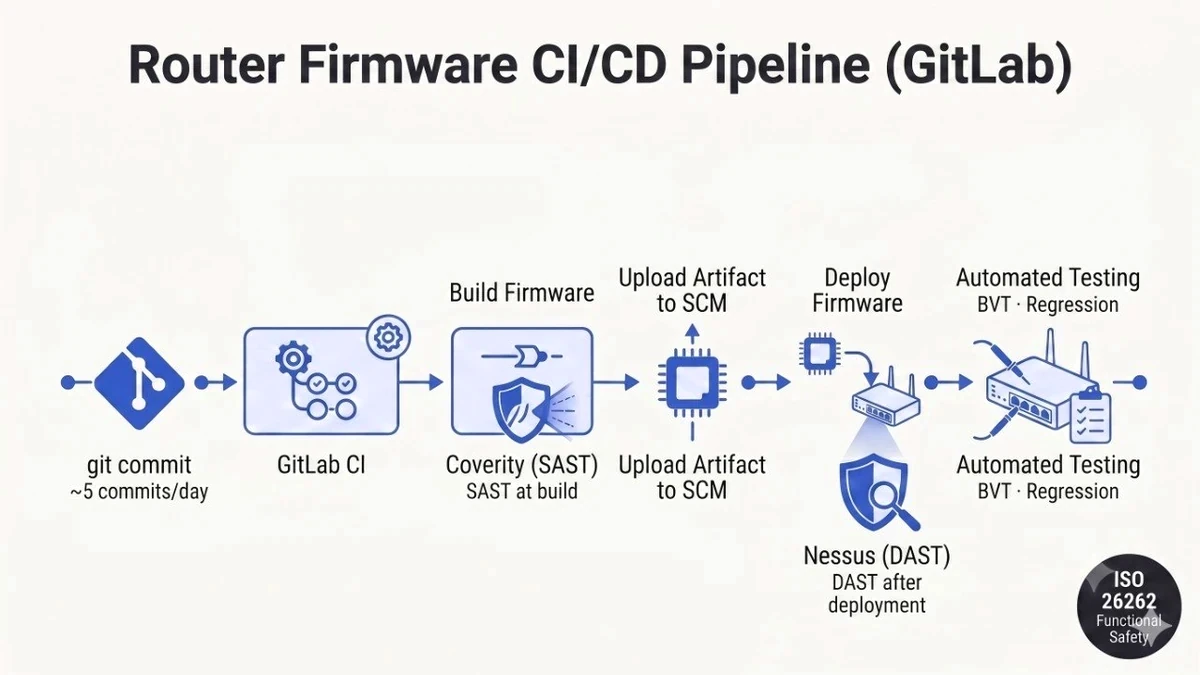
Router Firmware CI/CD Pipeline (GitLab)
- GitLab CI/CD
- ISO 26262
- Coverity
- Nessus
- SAST
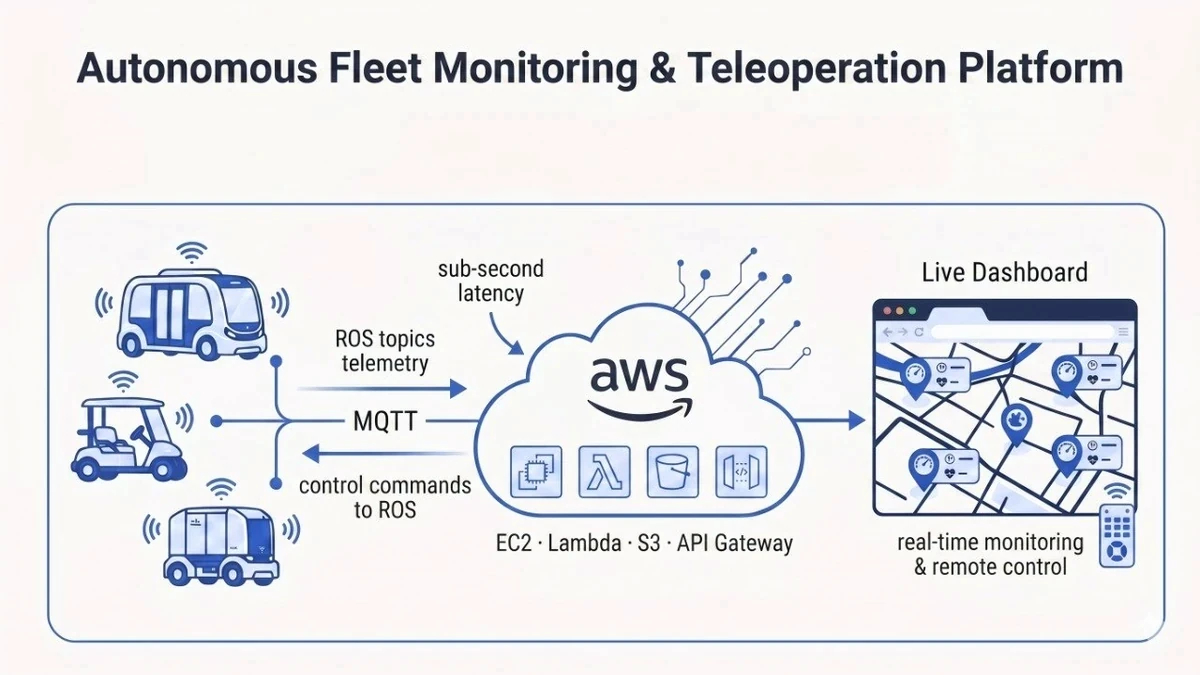
Autonomous Fleet Monitoring & Remote-Control Platform
- AWS
- MQTT
- ROS
- Autoware
- WebSocket
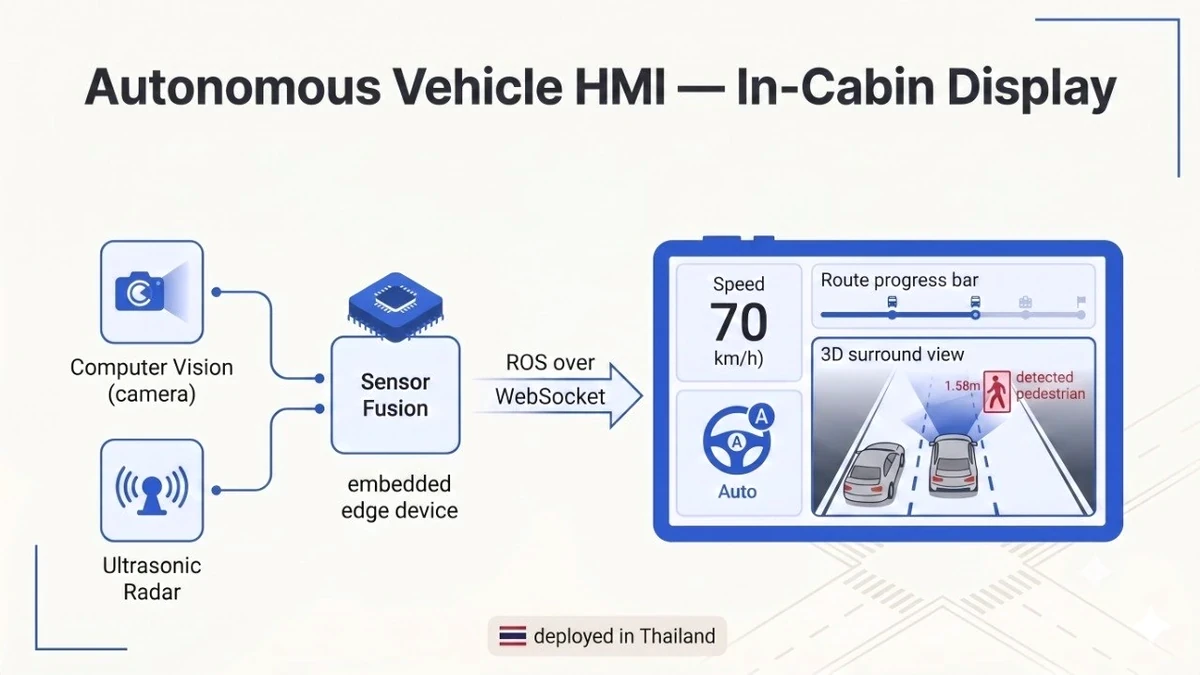
Autonomous Vehicle HMI (Thailand deployment)
- ROS
- WebSocket
- HMI
- Computer Vision
- Ultrasonic Radar
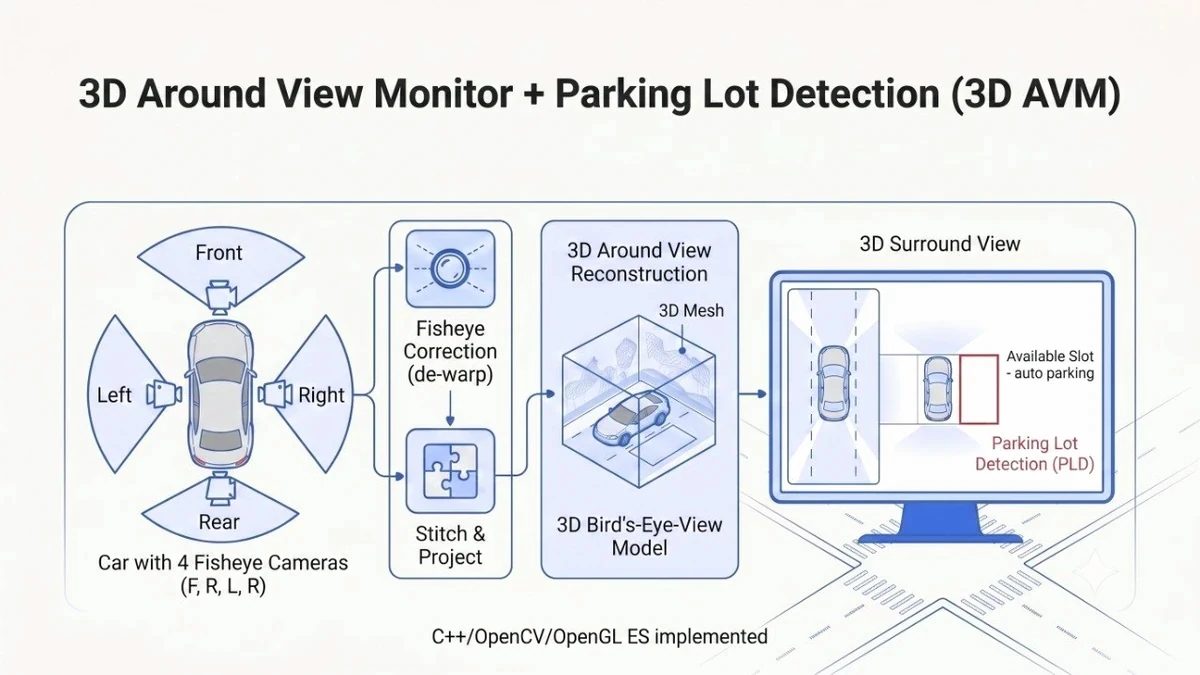
3D Around View Monitoring + Parking Detection (3D AVM)
- OpenCV
- OpenGL ES
- 3D Reconstruction
- Fisheye Calibration
- C++