自駕車 HMI 人機介面(泰國場域)
- ROS
- WebSocket
- HMI
- 電腦視覺
- 超音波雷達
- 嵌入式
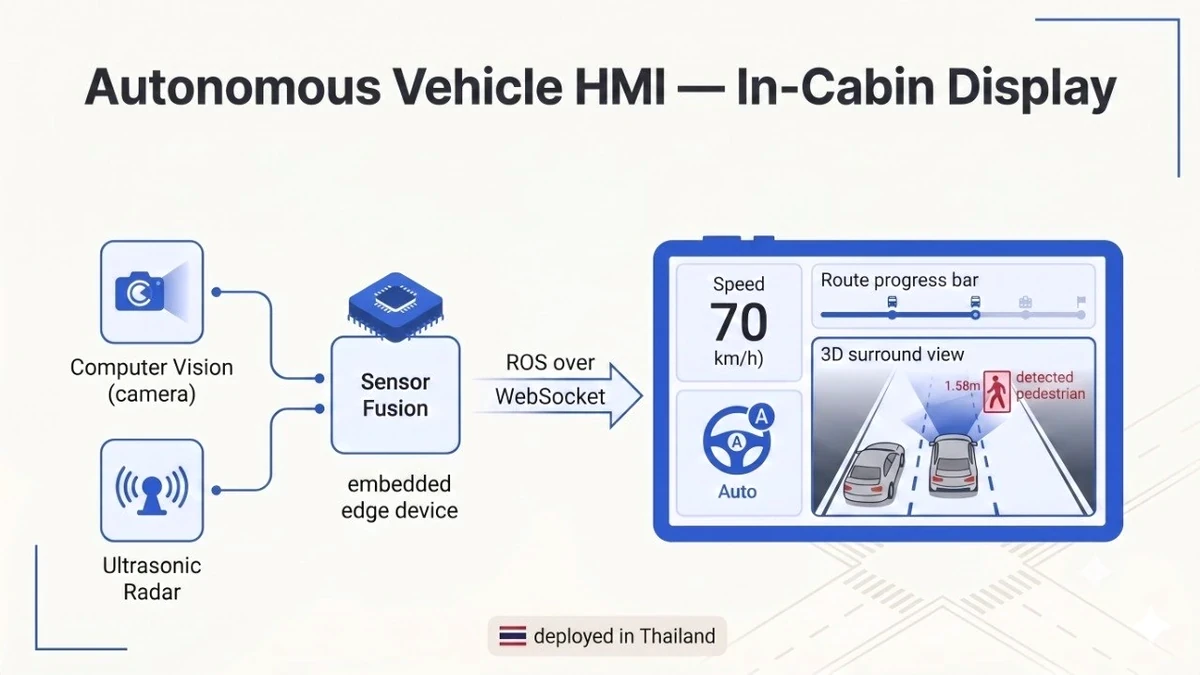
為自駕接駁車開發的即時人機介面(HMI),實際部署於泰國場域運行。
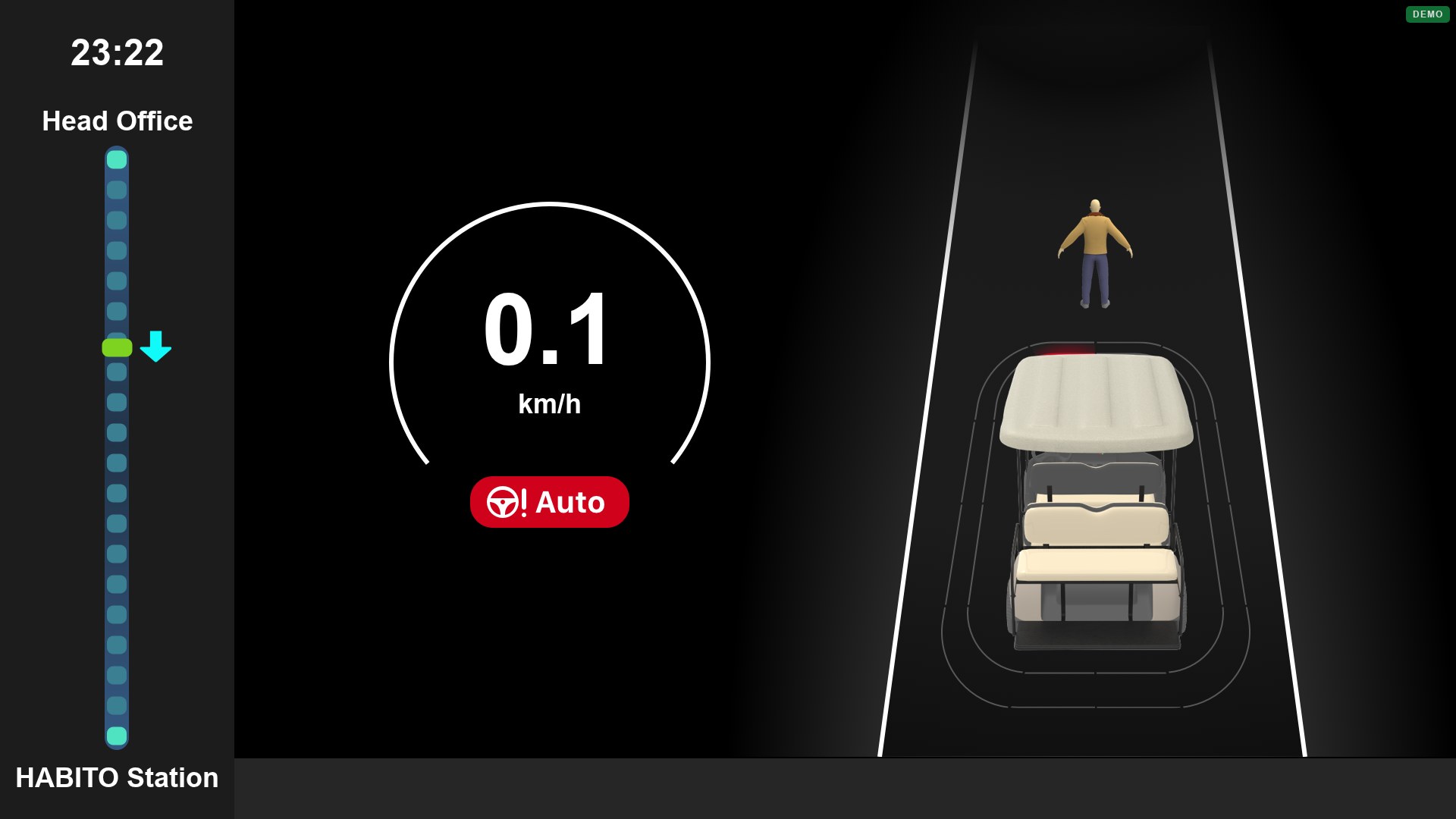
介面顯示關鍵車況:時速、路線進度、Auto 自駕模式狀態,並即時繪出車輛周圍的 3D 視角與偵測到的行人/障礙物 (畫面中前方的行人即被系統標出)。後端融合超音波雷達與電腦視覺訊號,透過 ROS over WebSocket 傳輸, 在邊緣端同時完成資料處理與顯示,提供駕駛/乘客直覺、可靠的周圍感知。
此照片為泰國實地運行畫面:車輛以 Auto 模式低速行駛,介面即時標示前方行人。

更多專案 ←→
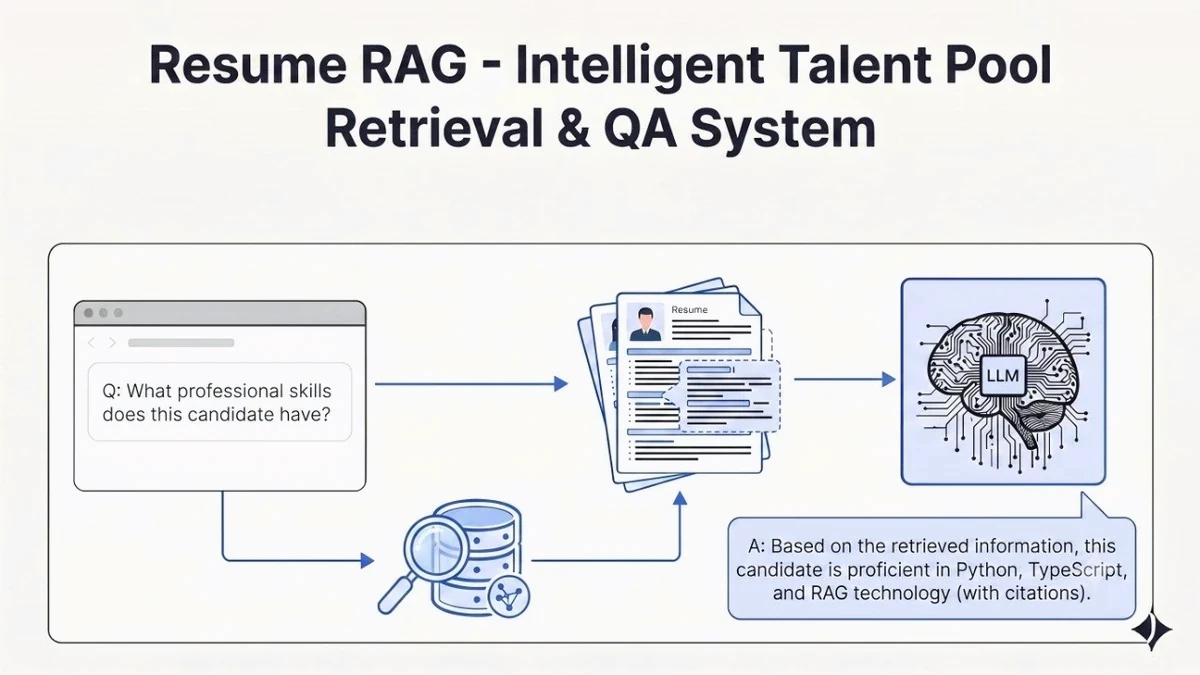
履歷 RAG 問答:Ask my resume
- Cloudflare Workers AI
- Vectorize
- bge-m3
- Llama 3.3
- RAG
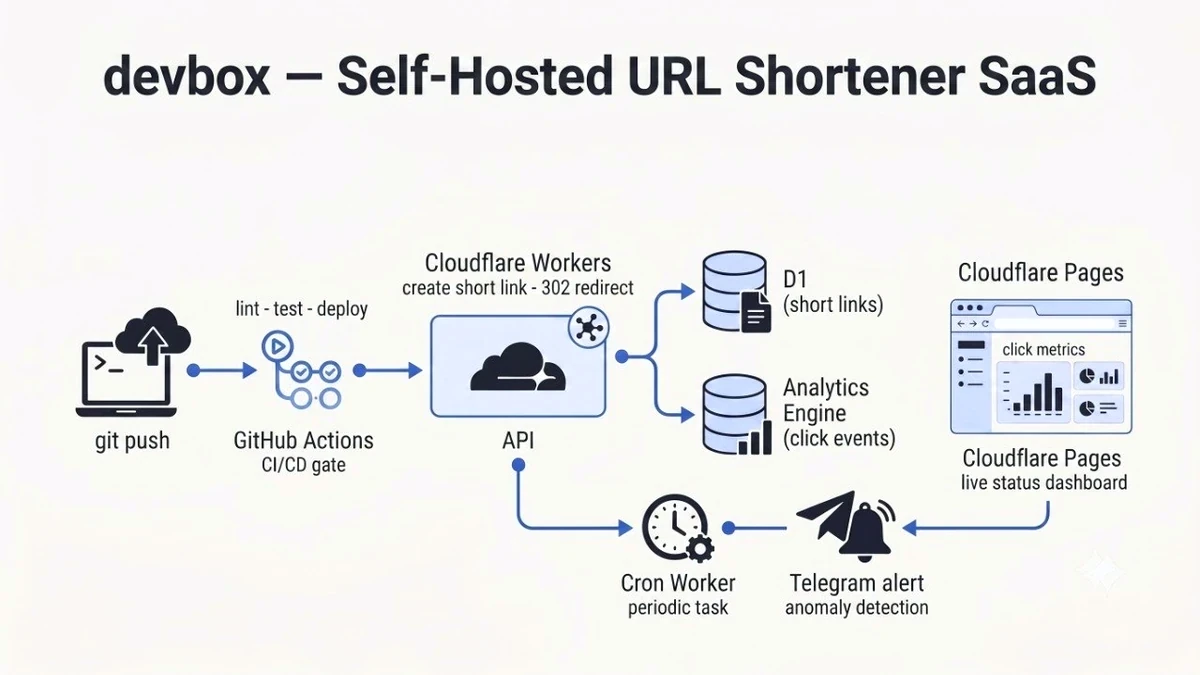
devbox:自架短網址 SaaS
- Cloudflare Workers
- D1
- Analytics Engine
- GitHub Actions
- Astro
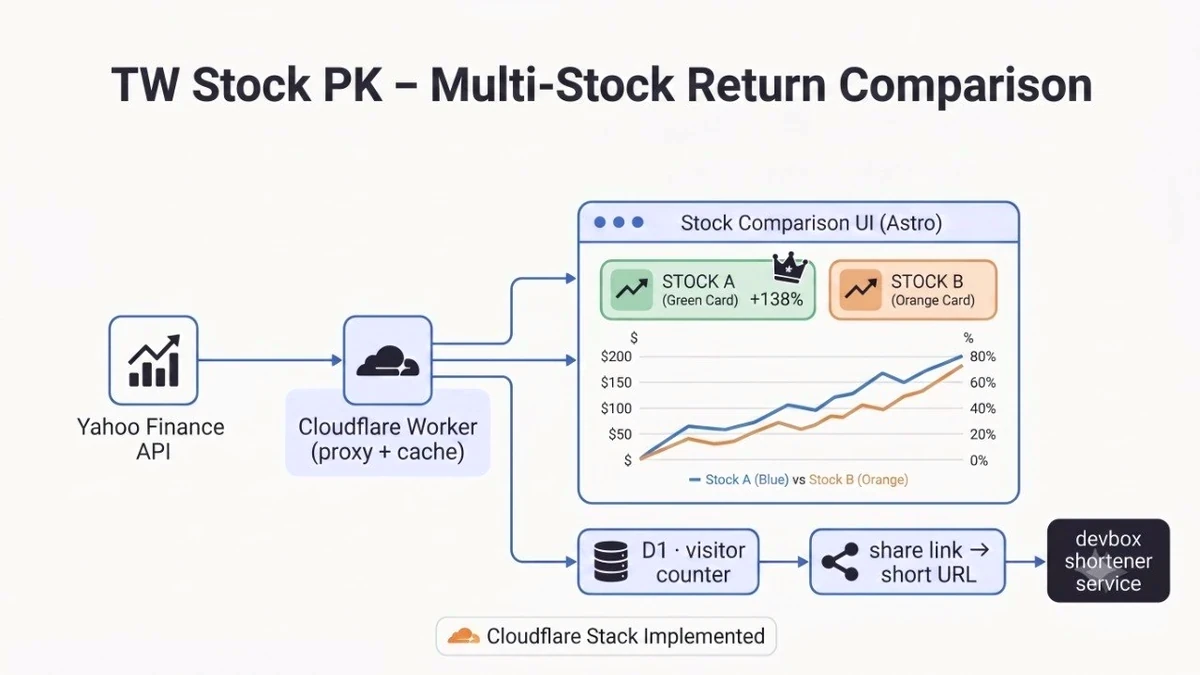
美股/台股多檔 PK:投報率比較工具
- Cloudflare Workers
- Pages
- D1
- Astro
- TypeScript
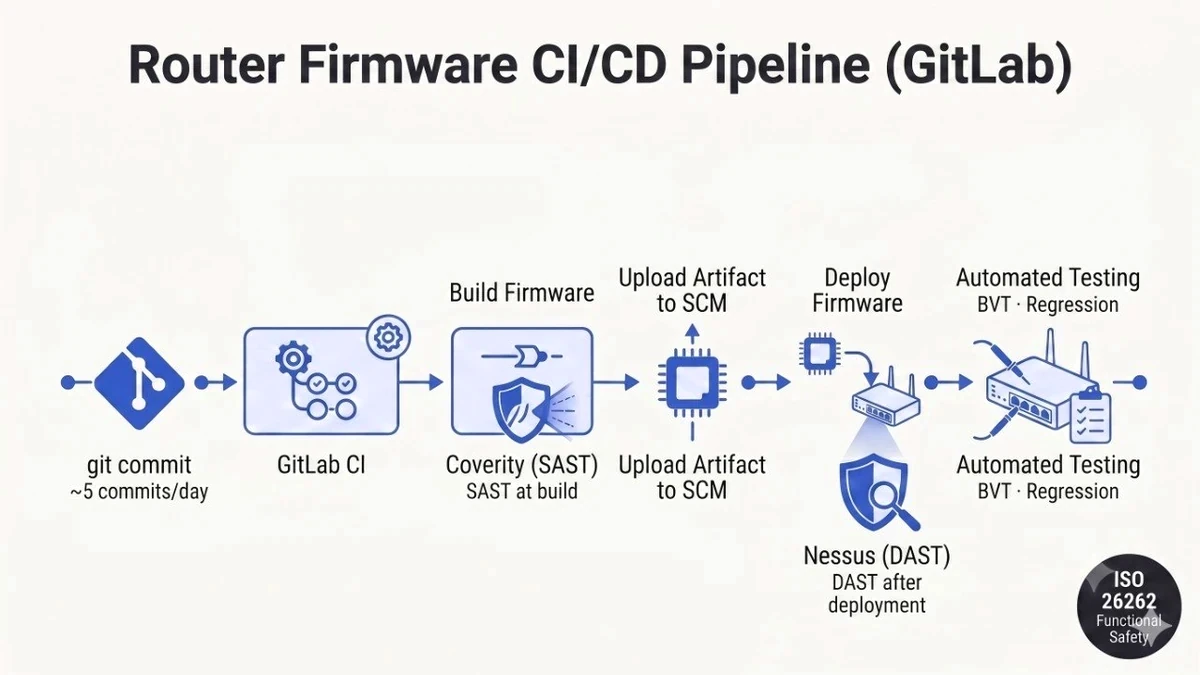
路由器韌體 CI/CD Pipeline(GitLab)
- GitLab CI/CD
- ISO 26262
- Coverity
- Nessus
- SAST
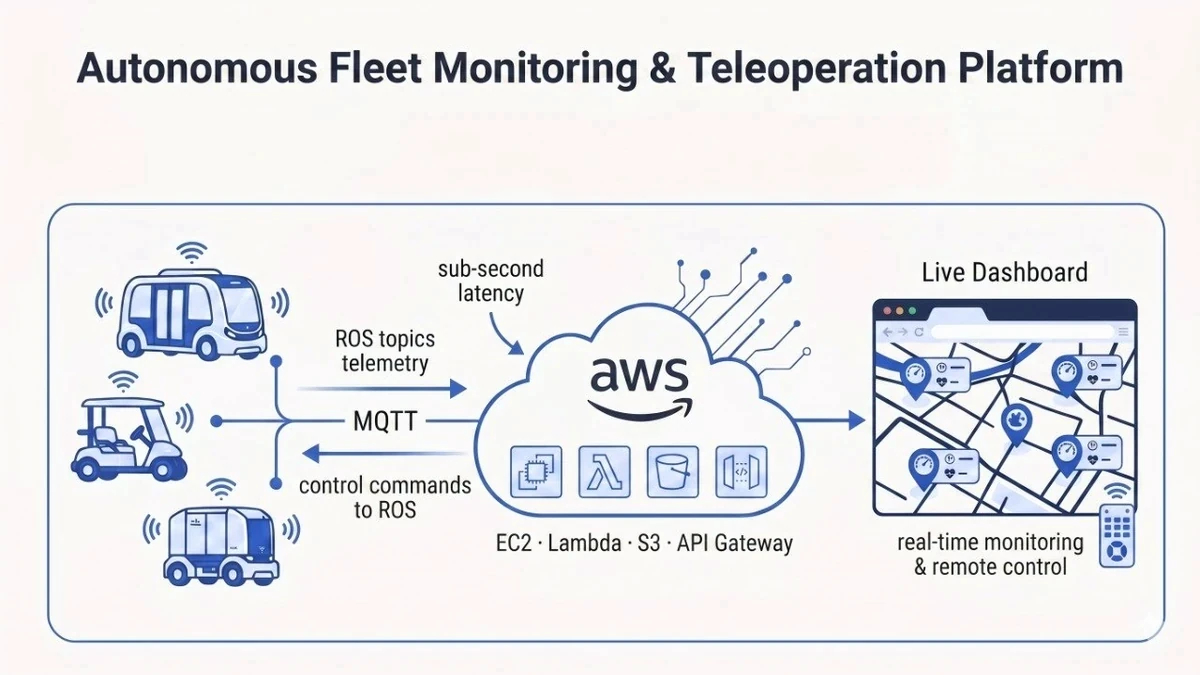
自駕車隊監控與遠端遙控平台
- AWS
- MQTT
- ROS
- Autoware
- WebSocket
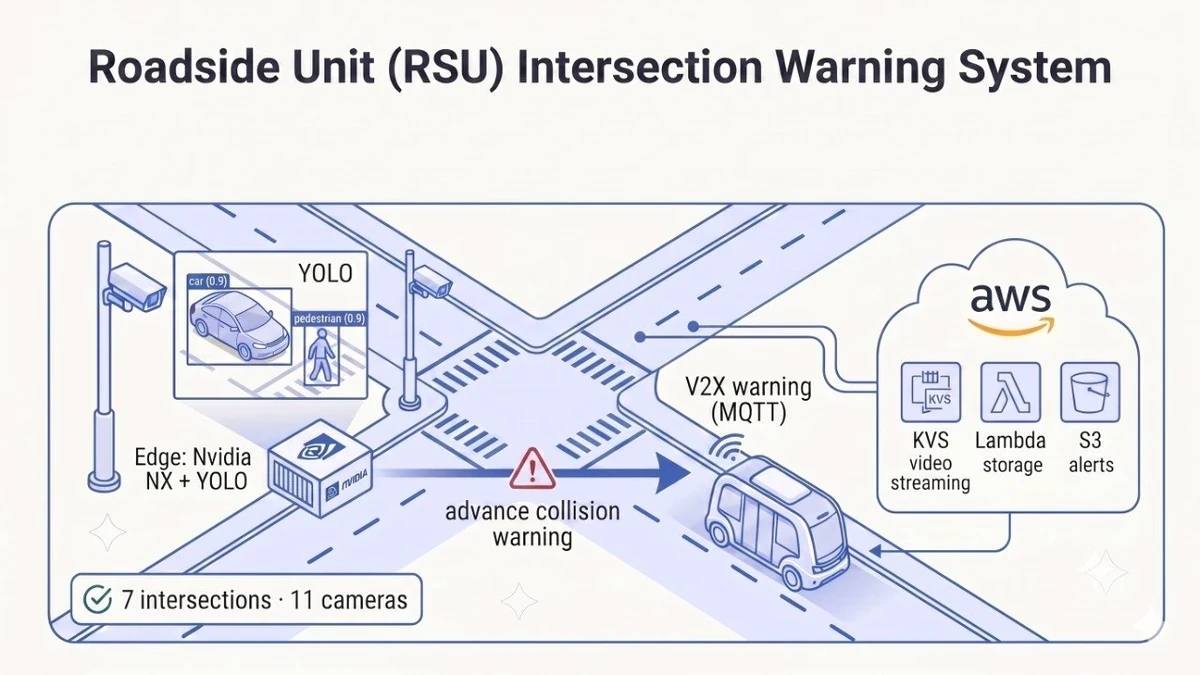
路側單元(RSU)路口警示系統
- Nvidia NX
- YOLO
- AWS KVS
- Lambda
- S3
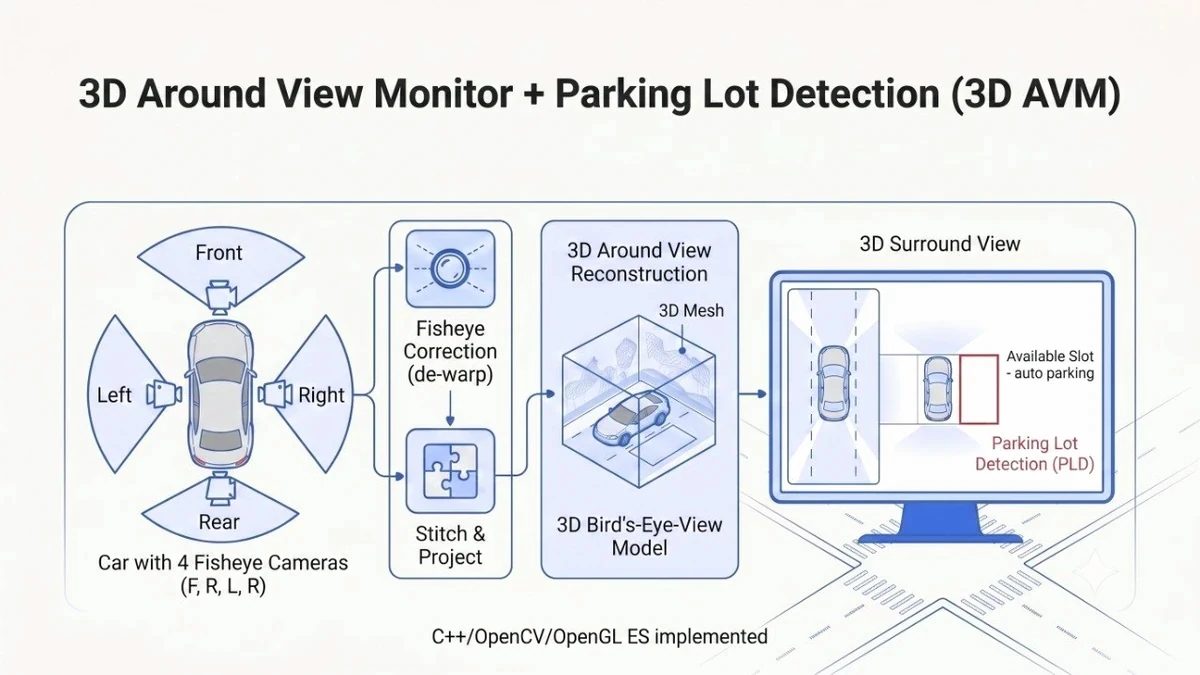
3D 環景監控 + 停車格偵測(3D AVM)
- OpenCV
- OpenGL ES
- 3D 重建
- 魚眼校正
- C++