3D 環景監控 + 停車格偵測(3D AVM)
- OpenCV
- OpenGL ES
- 3D 重建
- 魚眼校正
- C++
- Nvidia
- Fujitsu
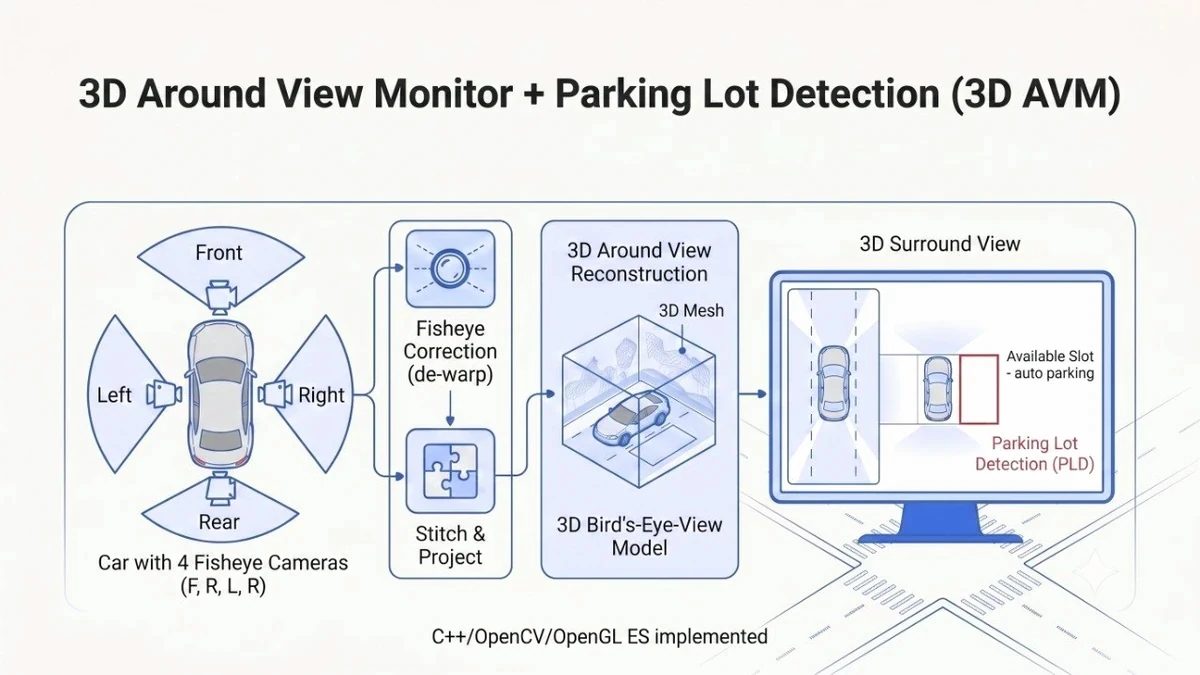
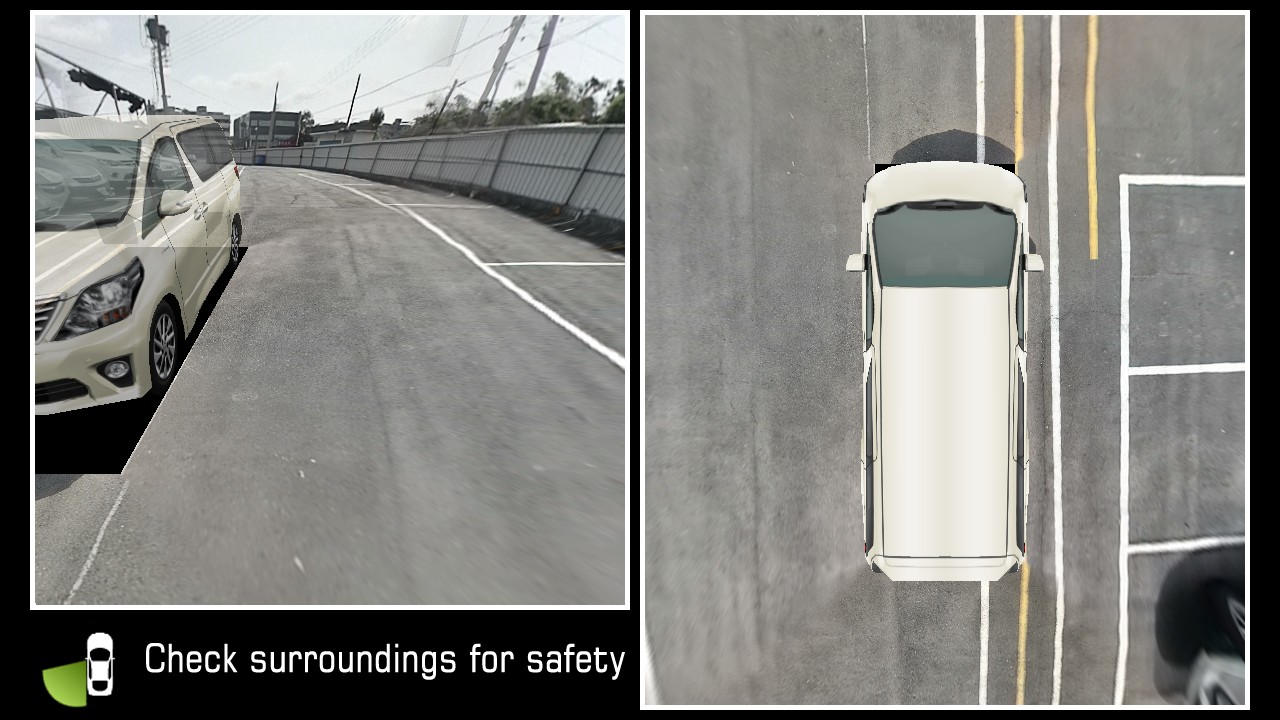
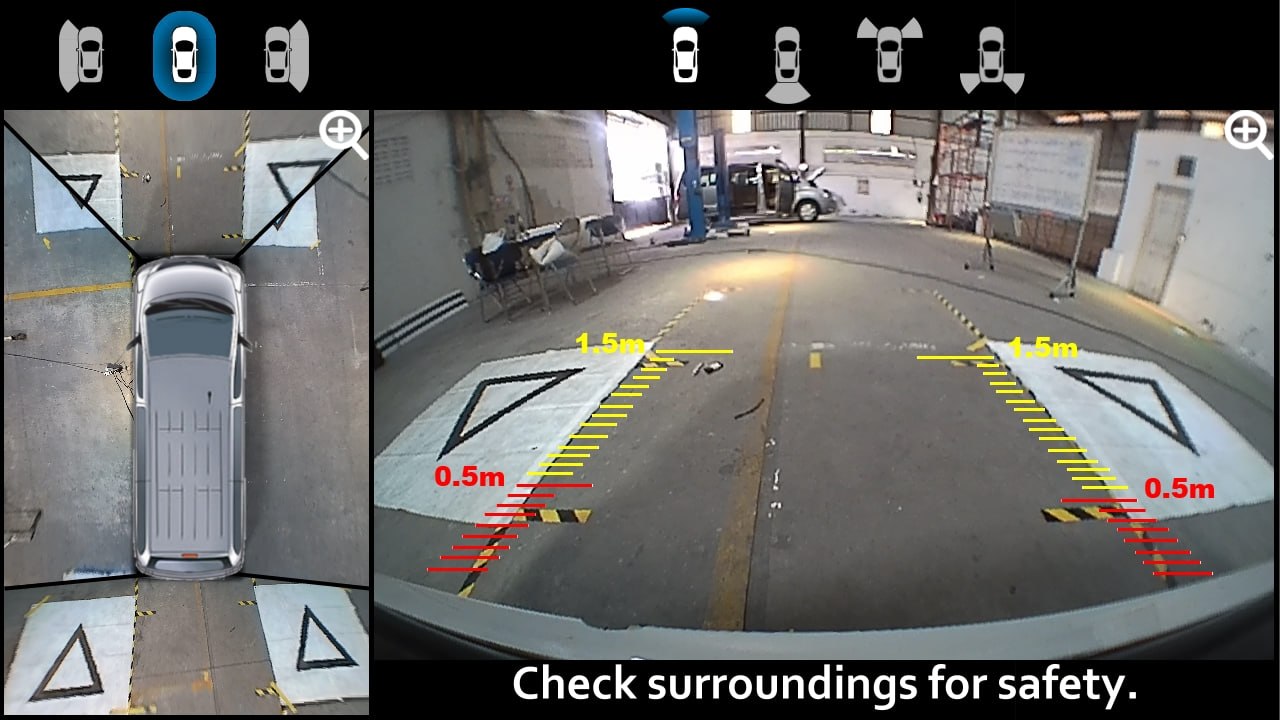
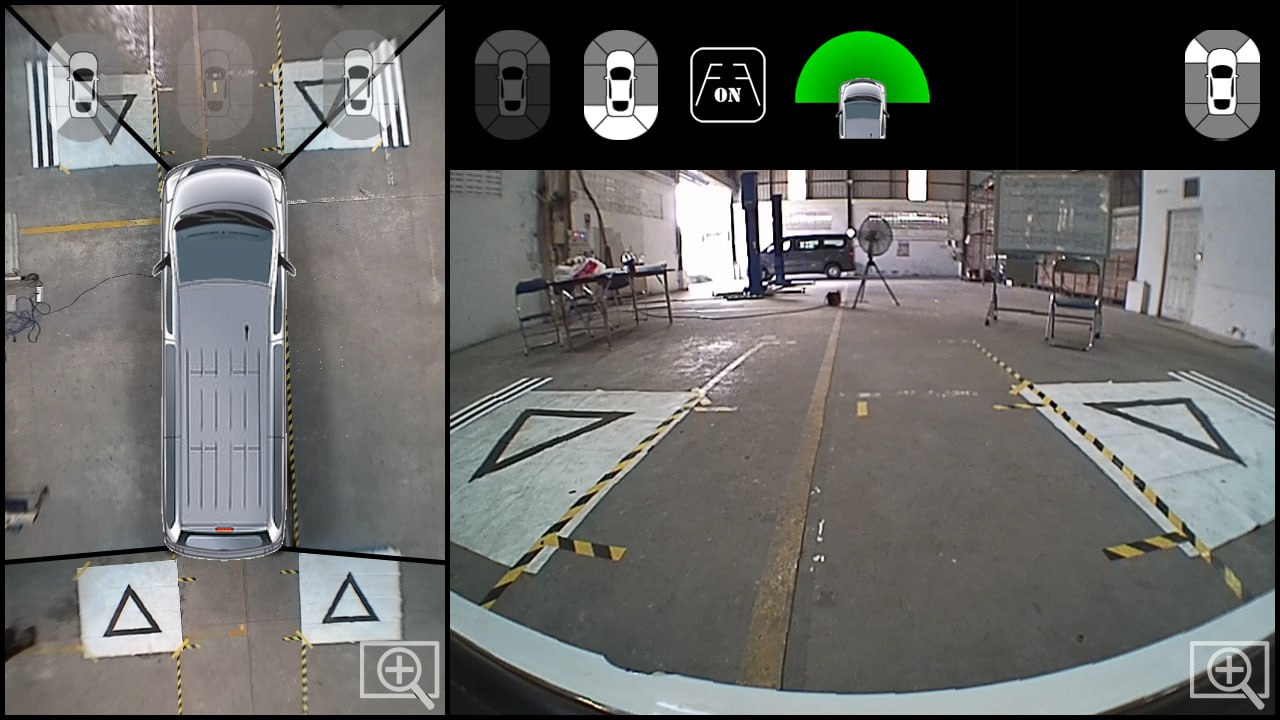
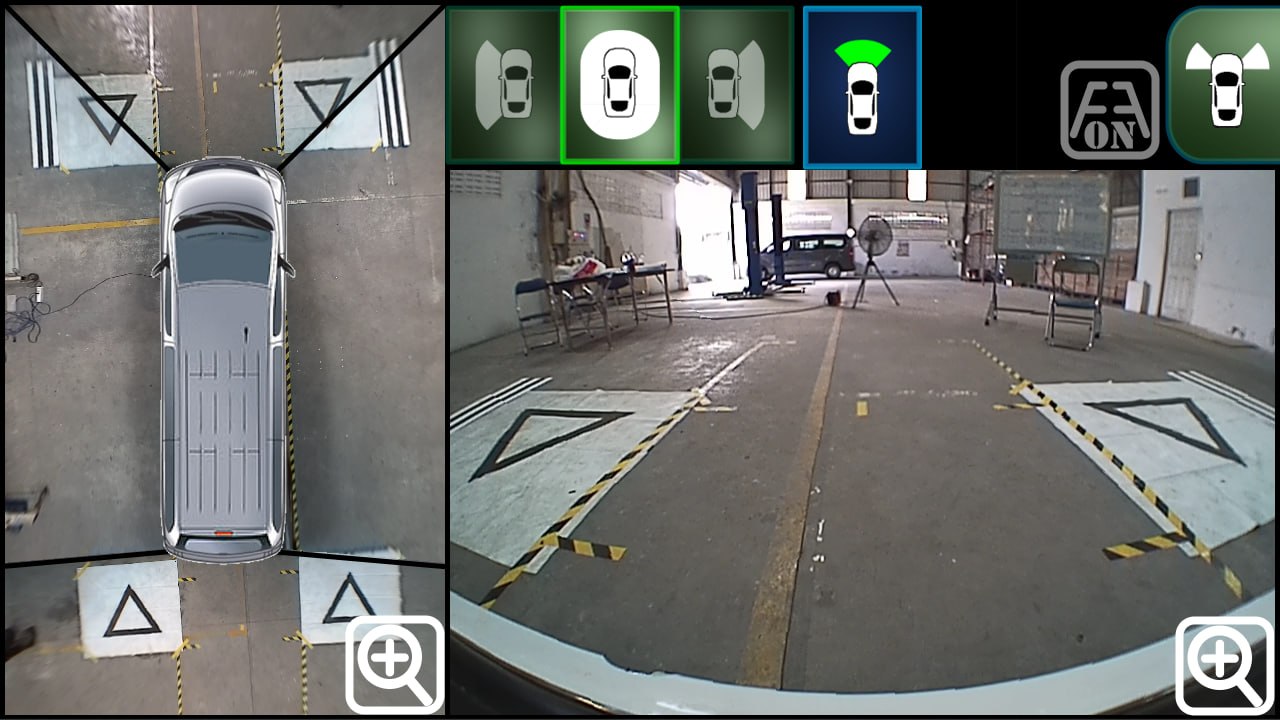
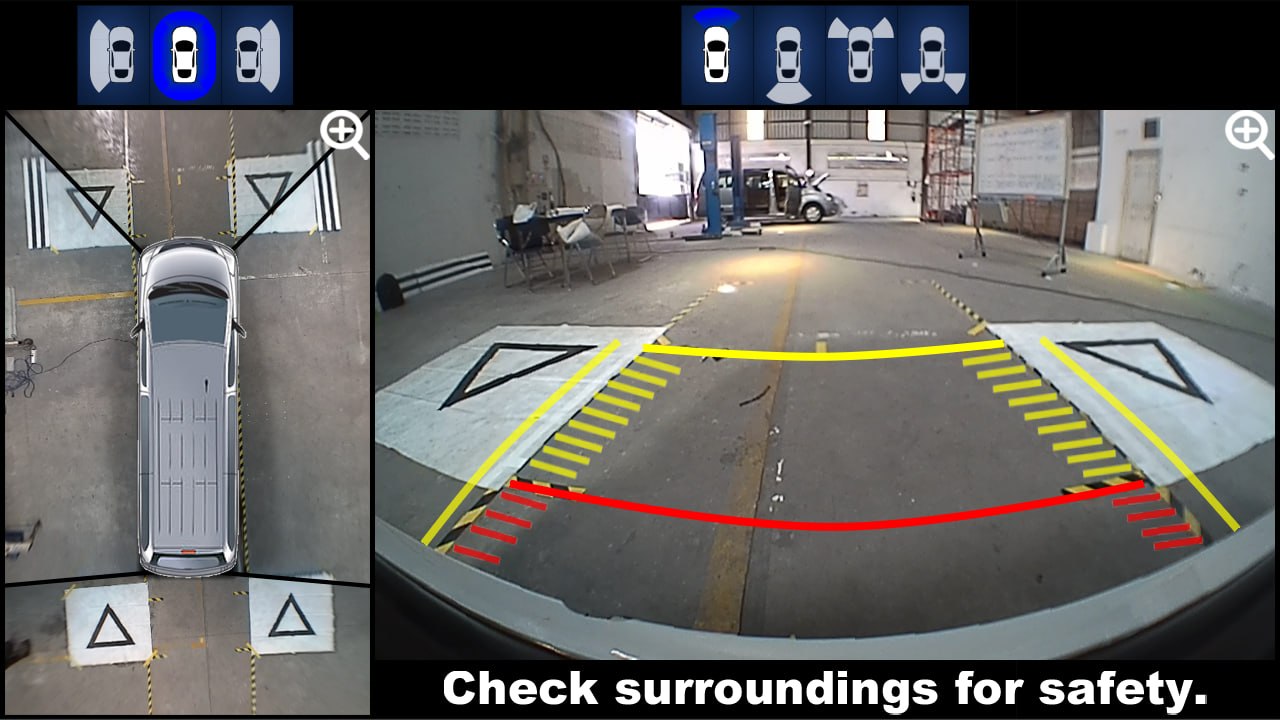
自主研發的 3D Around View Monitoring(3D AVM) 系統,將前、後、左、右四顆魚眼攝影機的影像, 經去畸變、定位對齊後投影,融合重建成統一的 3D 立體環景模型,用於車輛環境感知與自動停車。
核心技術包含魚眼鏡頭校正、影像投影與接縫拼接,以及在嵌入式平台(Fujitsu、Nvidia)上以 OpenCV 與 OpenGL ES 完成即時 3D 重建與渲染。系統設計成可跨任意嵌入式平台,並延伸出停車格偵測功能, 整合進自動停車產品。
此技術有兩條交付成果:
- 富士通(Fujitsu)系統平台版本,交付泰國車廠並進入其供應鏈,達 Tier 1 車規量產級交付。
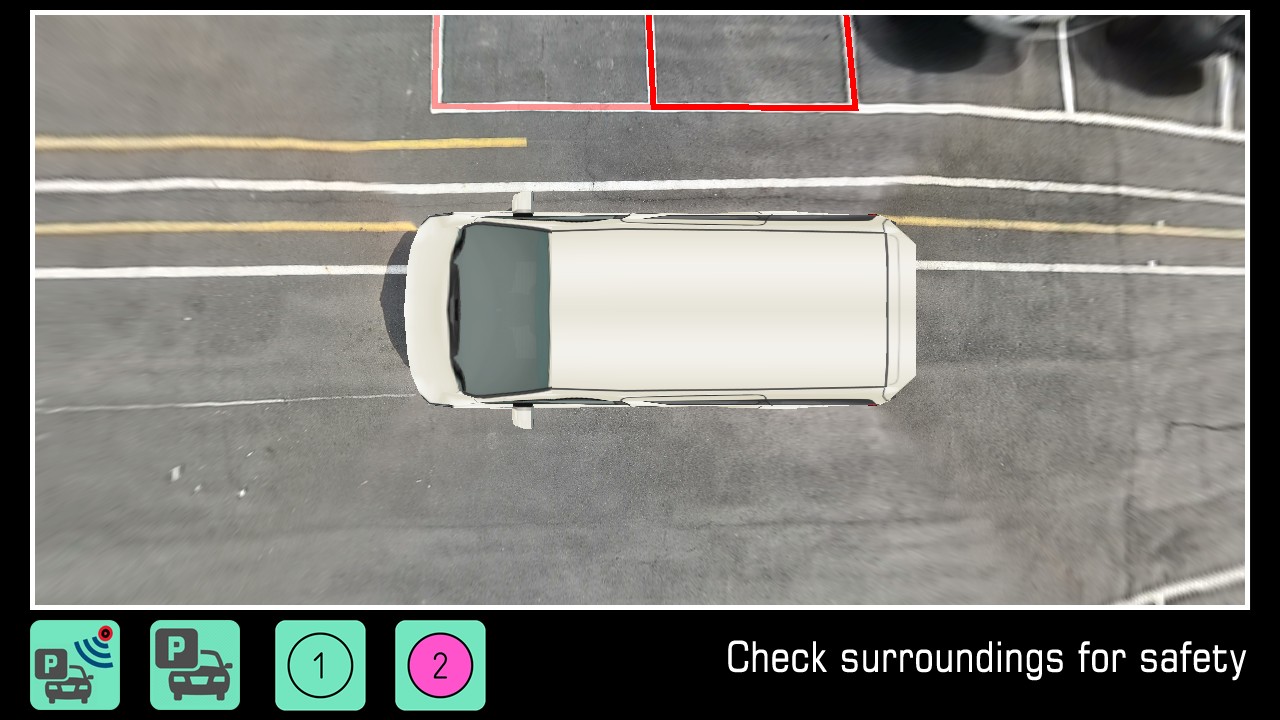
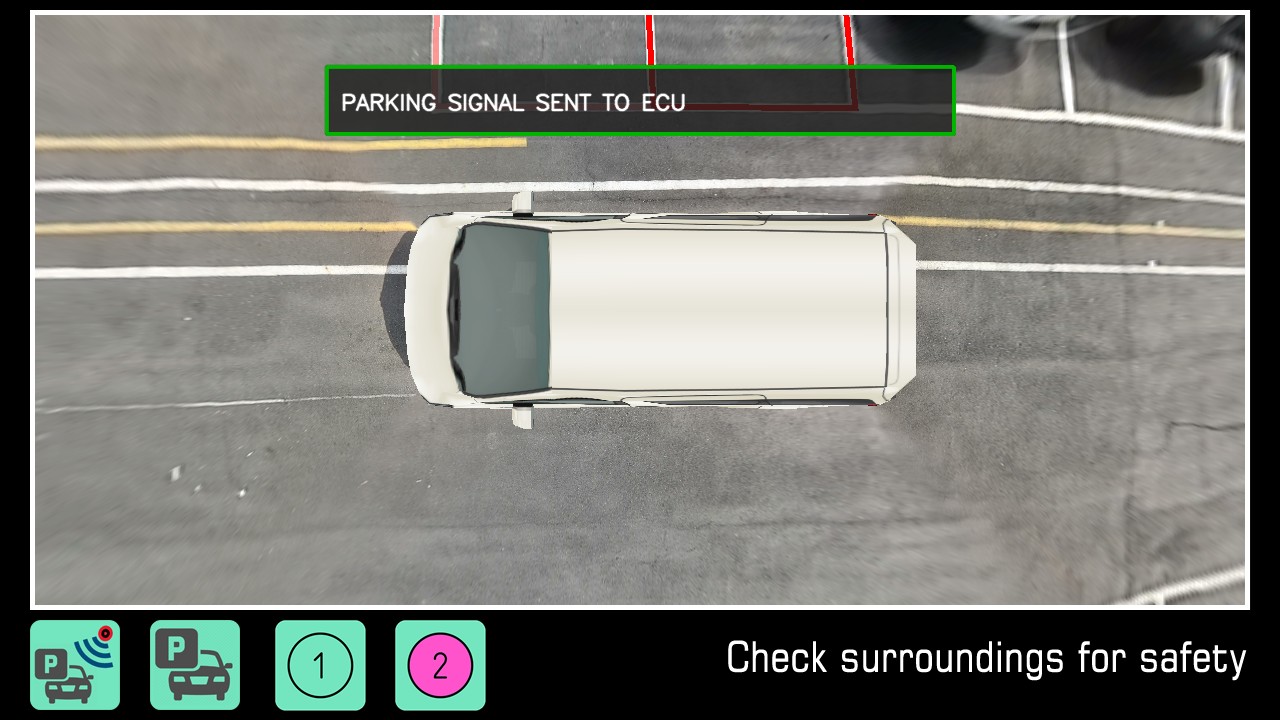
- 自主研發版本,整合停車格偵測(PLD),在環景鳥瞰上即時標示可用停車格、支援自動停車;此版以技術轉移交付中國輝創(Whetron 蘇州子公司),再由其整合並交付終端客戶。
展現符合車規嚴格要求、且能跨平台與跨團隊移轉的量產級軟體交付能力。(自主研發 AVM+PLD 的技術說明見上方連結;原始碼不公開。)



更多專案 ←→
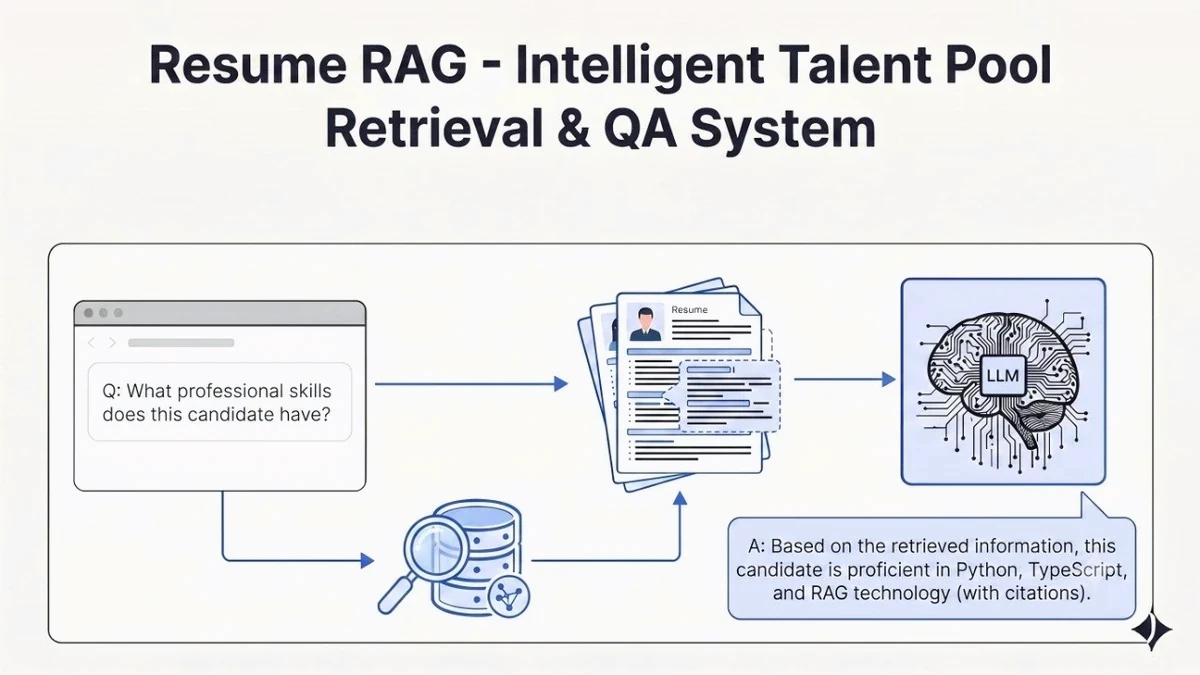
履歷 RAG 問答:Ask my resume
- Cloudflare Workers AI
- Vectorize
- bge-m3
- Llama 3.3
- RAG
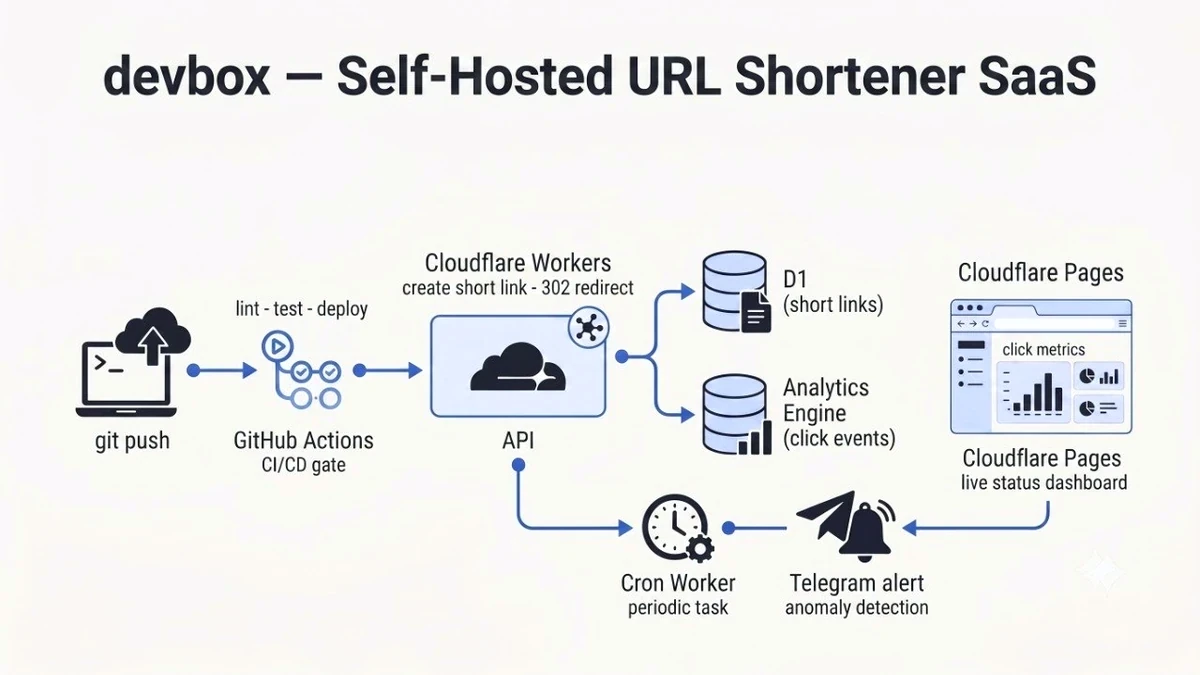
devbox:自架短網址 SaaS
- Cloudflare Workers
- D1
- Analytics Engine
- GitHub Actions
- Astro
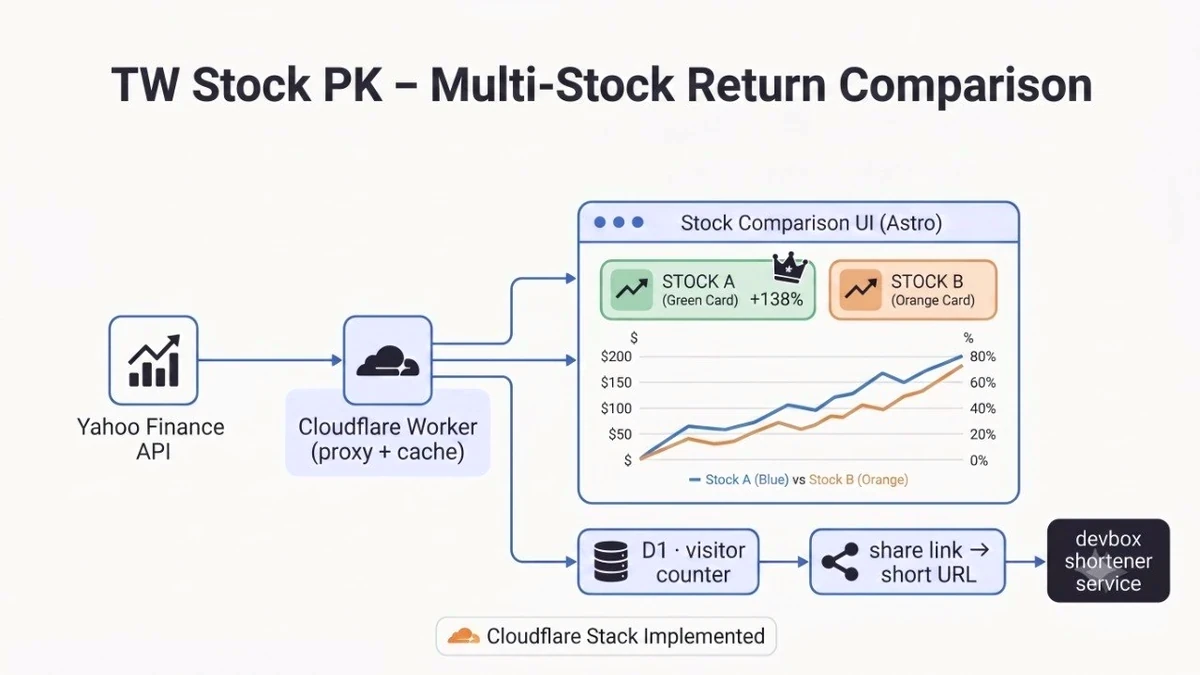
美股/台股多檔 PK:投報率比較工具
- Cloudflare Workers
- Pages
- D1
- Astro
- TypeScript
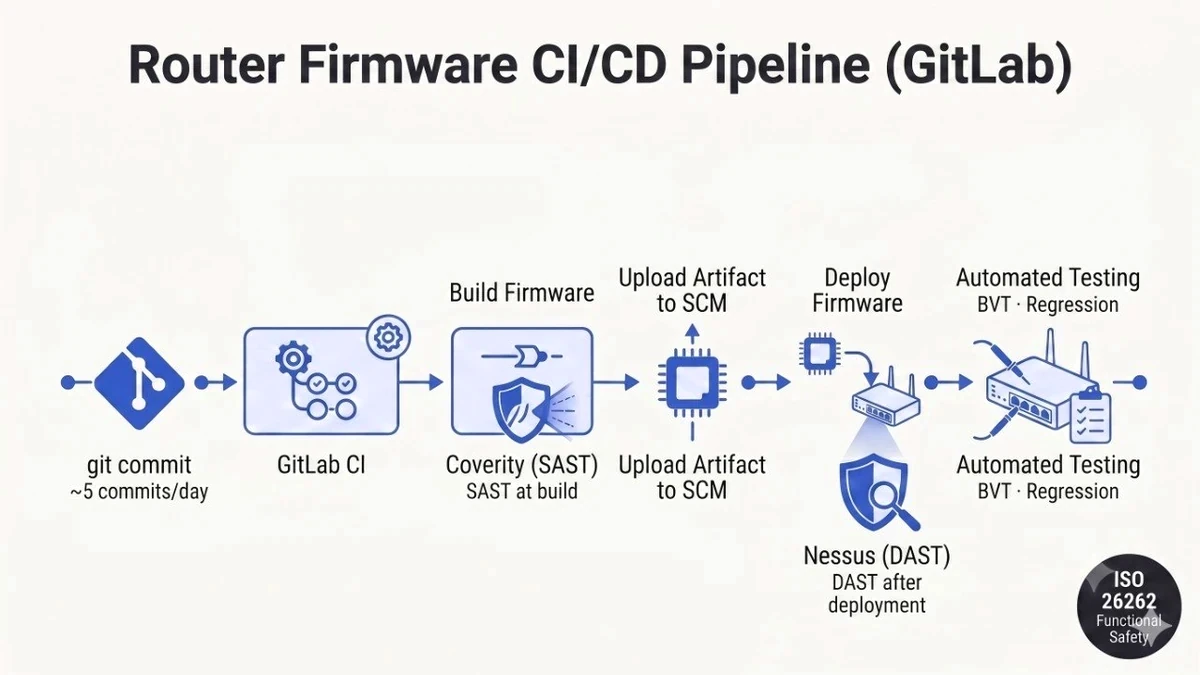
路由器韌體 CI/CD Pipeline(GitLab)
- GitLab CI/CD
- ISO 26262
- Coverity
- Nessus
- SAST
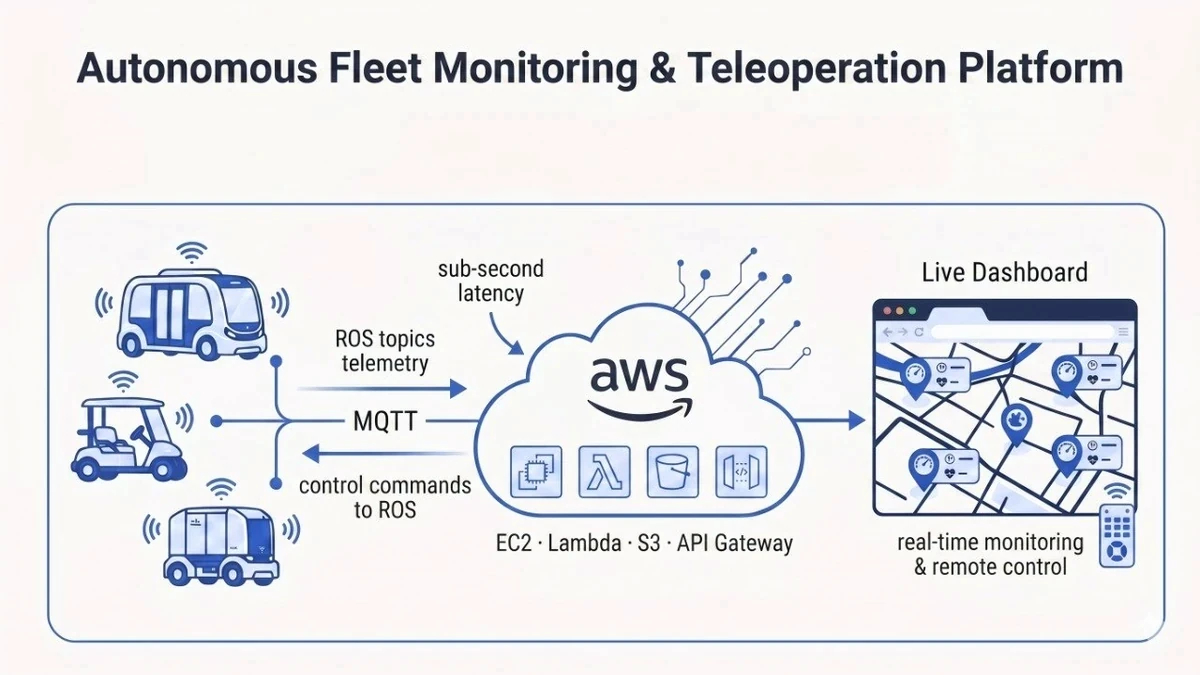
自駕車隊監控與遠端遙控平台
- AWS
- MQTT
- ROS
- Autoware
- WebSocket
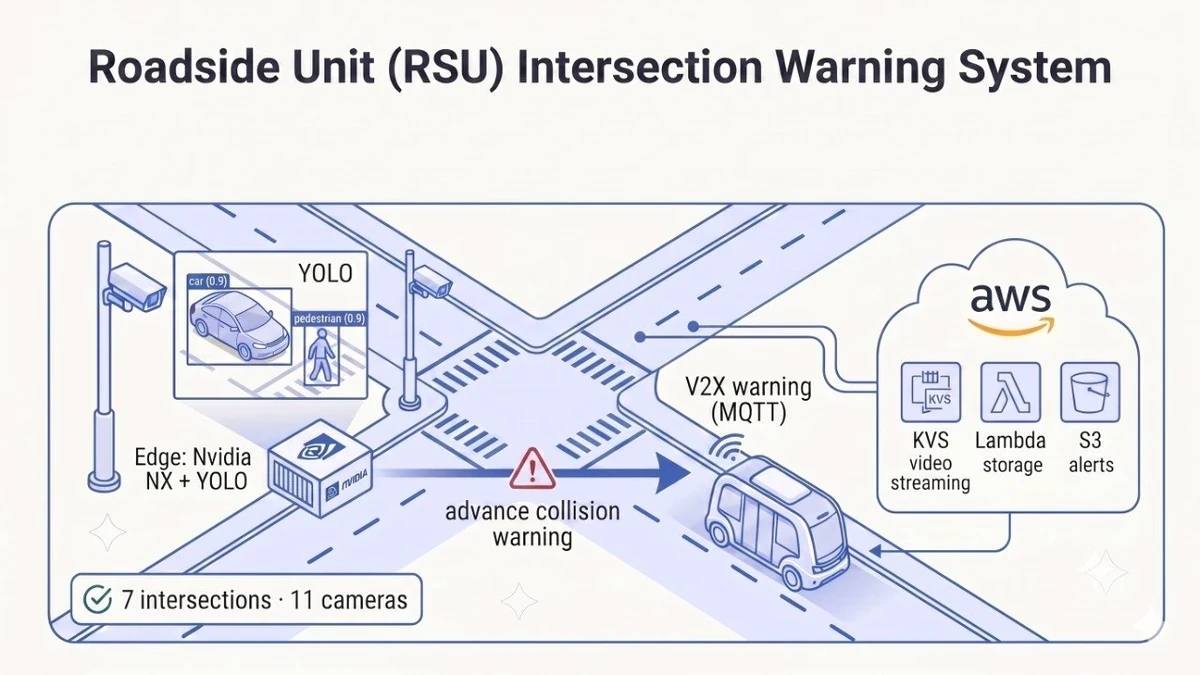
路側單元(RSU)路口警示系統
- Nvidia NX
- YOLO
- AWS KVS
- Lambda
- S3
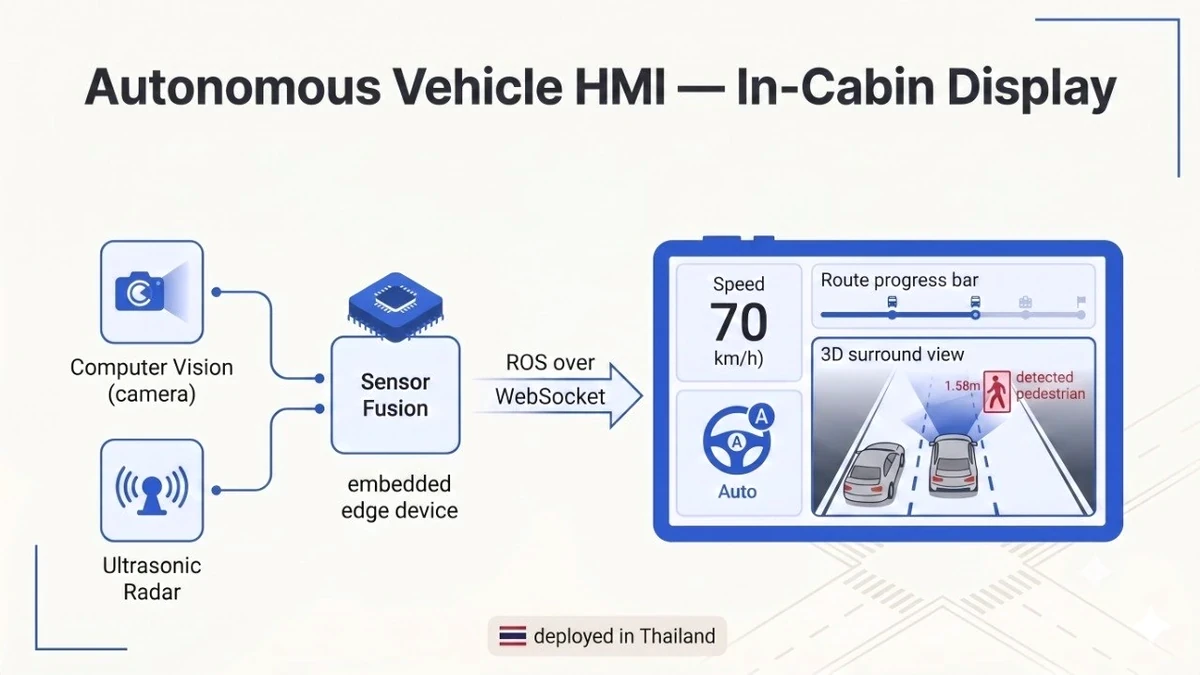
自駕車 HMI 人機介面(泰國場域)
- ROS
- WebSocket
- HMI
- 電腦視覺
- 超音波雷達