自駕車隊監控與遠端遙控平台
- AWS
- MQTT
- ROS
- Autoware
- WebSocket
- Node.js
- Vue
- IoT Core
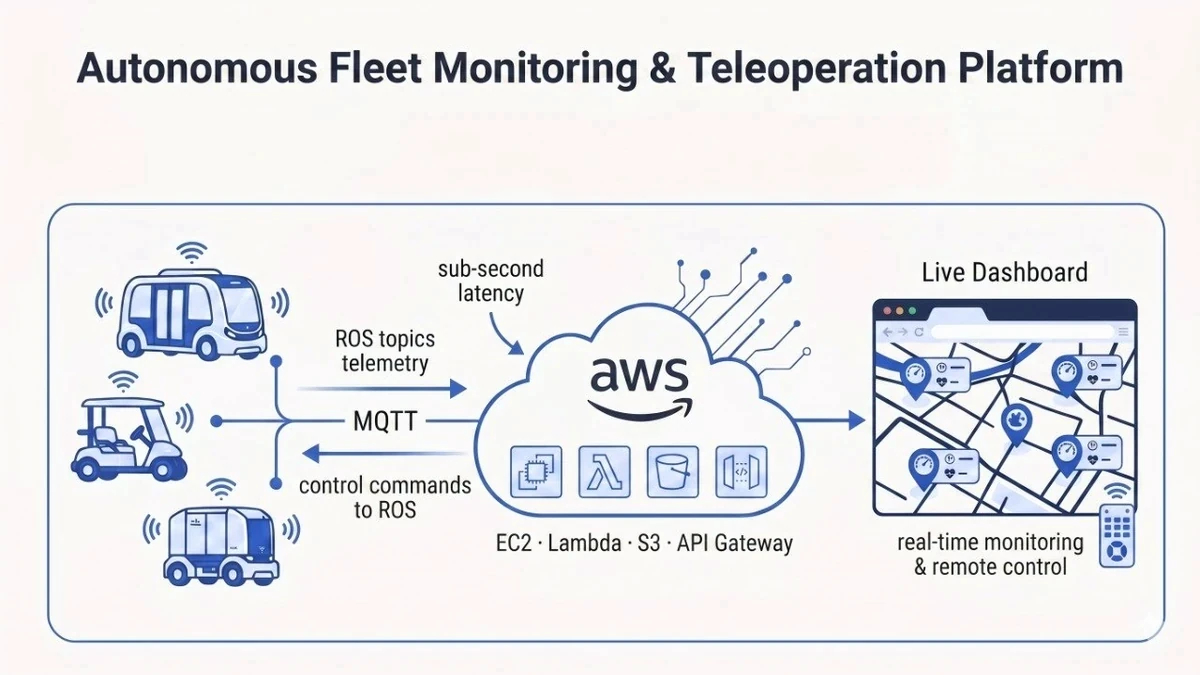
從零在 AWS 上設計並建置的自駕車隊即時監控與遠端遙控平台,整合 13 台自駕車(4 種車型): 自駕接駁車、智慧高爾夫球車、可遠端操控的無人車。
平台以 AWS IoT SDK 訂閱車端 ROS topics、經 MQTT 串流上雲;反向亦可,使用者在瀏覽器下達控制指令, 系統收 MQTT 訊號後轉成 ROS message 交由車輛執行,達 sub-second 低延遲。後端用 EC2 / Lambda / S3 / API Gateway 構成, 前端為全端響應式儀表板,支援即時狀態追蹤、歷史資料分析與遠端介入操作。
我並創立並領導 Cloud Operations Team,建立此平台的開發流程、運維標準與最佳實踐,確保系統可擴展性與穩定性。
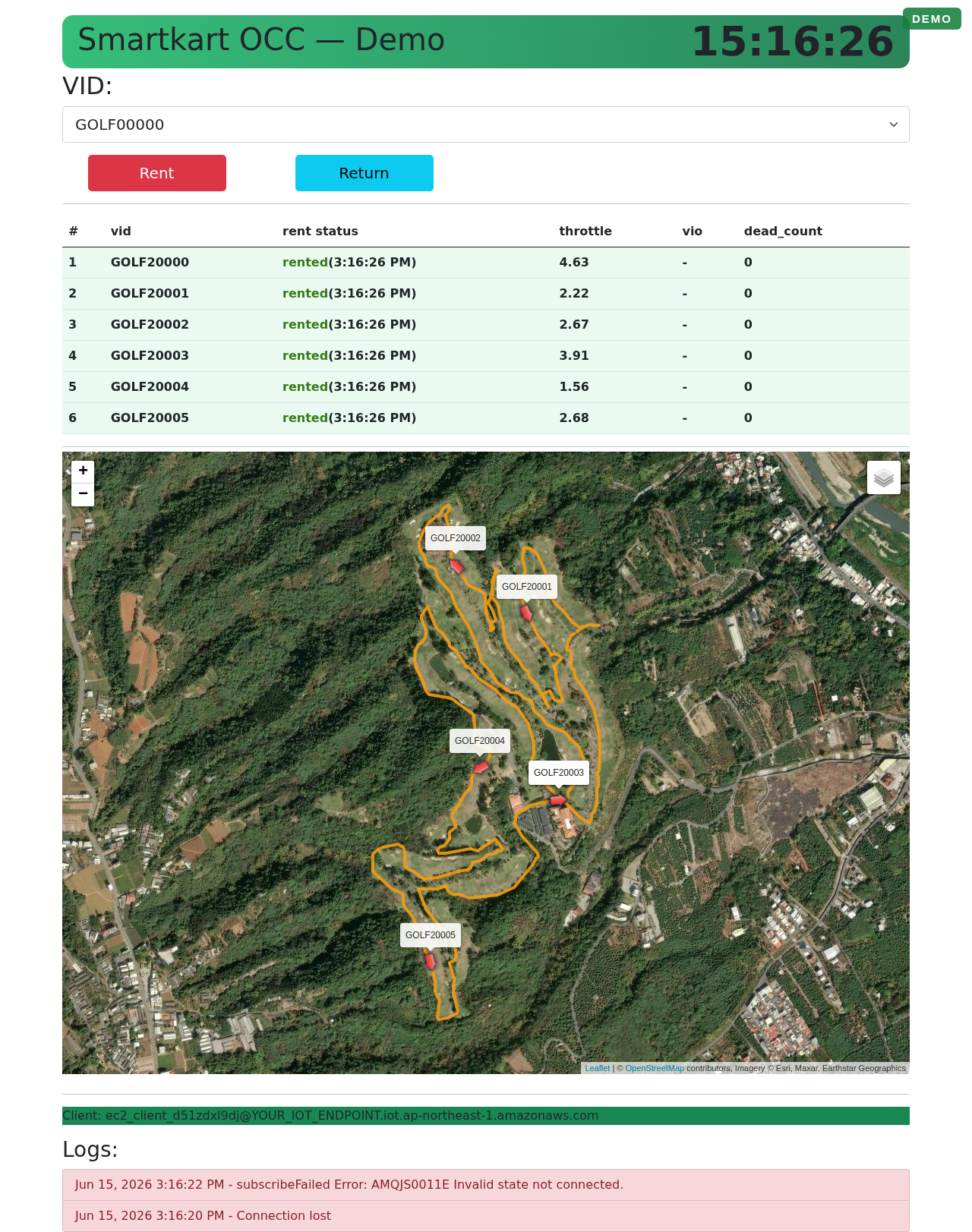
高爾夫球場自駕球車車隊 OCC:衛星地圖上即時車隊定位、租借/歸還狀態、車速與路線。
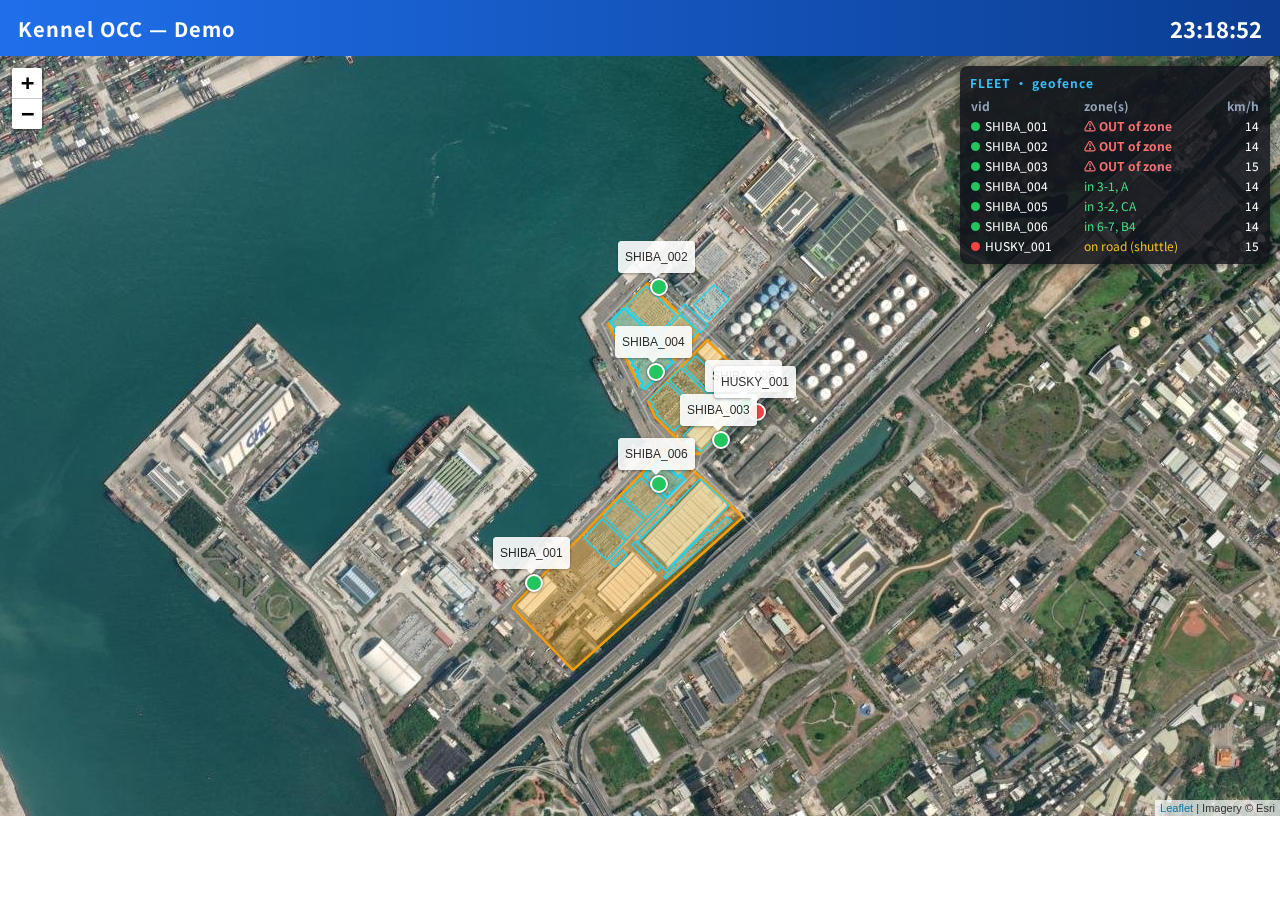
港區自駕/工作車隊 OCC:即時定位 + 地理圍籬區域監控(point-in-polygon 判斷車輛在哪一區、是否跑出區域)+ 車輛沿港區道路行駛。
自駕巡邏/任務車 OCC:規劃起點→終點路線、沿路導航到目標停靠點、即時軌跡與遠端指令。

更多專案 ←→
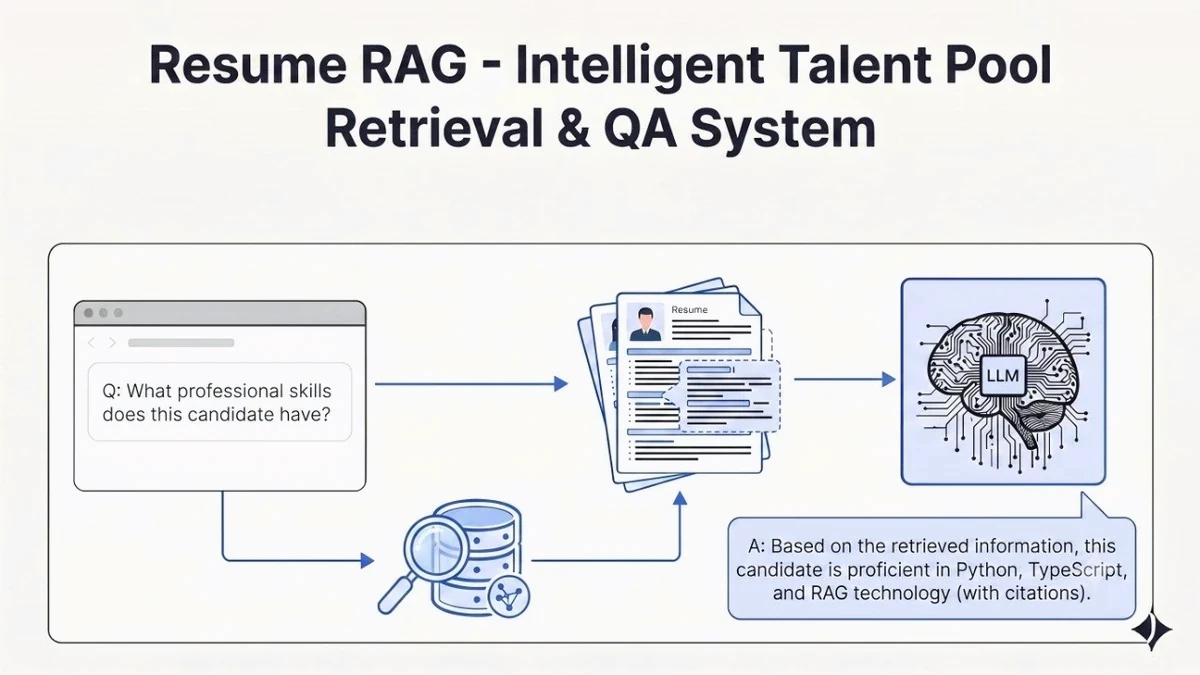
履歷 RAG 問答:Ask my resume
- Cloudflare Workers AI
- Vectorize
- bge-m3
- Llama 3.3
- RAG
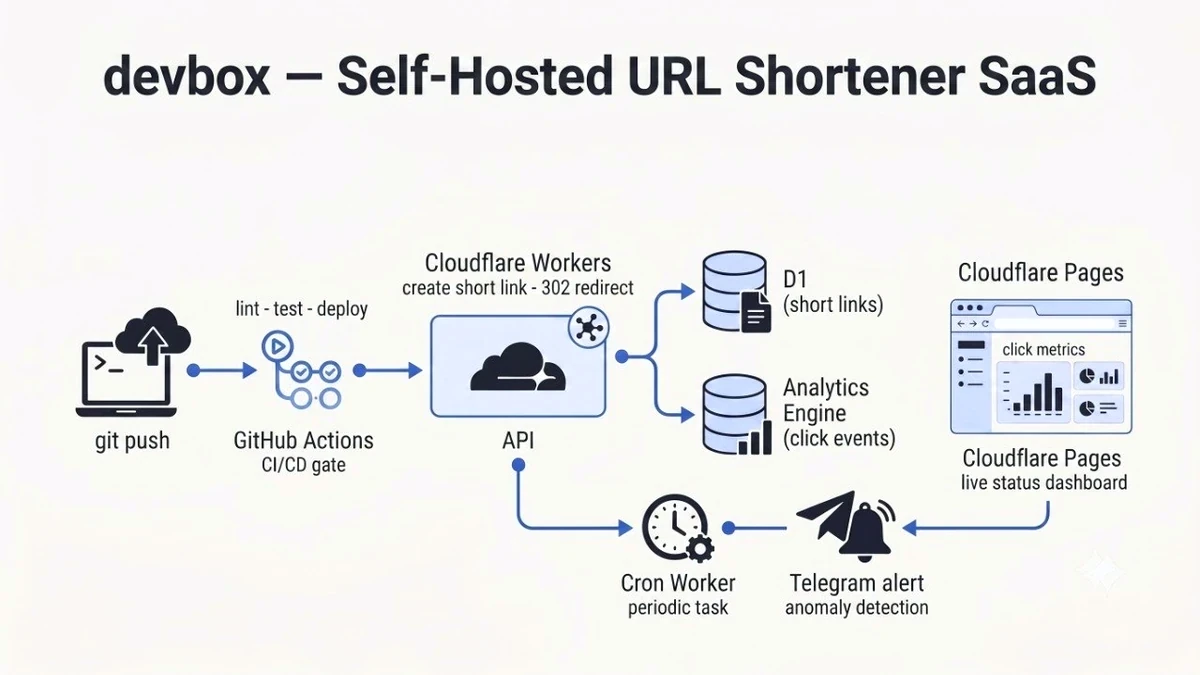
devbox:自架短網址 SaaS
- Cloudflare Workers
- D1
- Analytics Engine
- GitHub Actions
- Astro
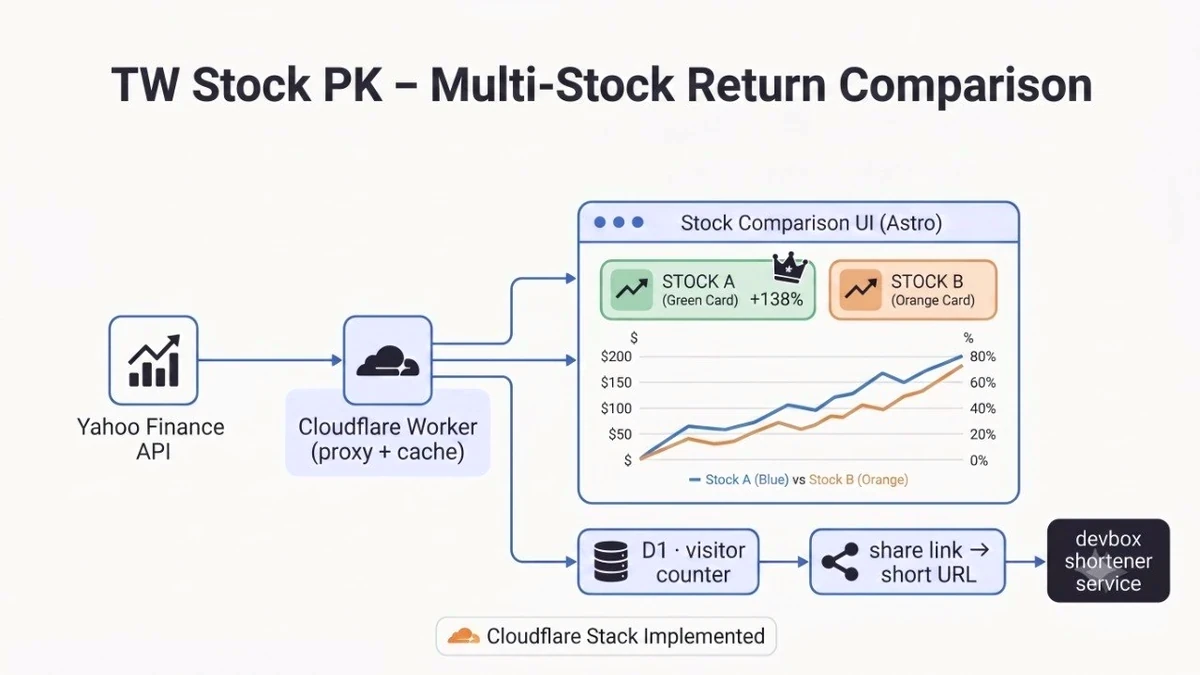
美股/台股多檔 PK:投報率比較工具
- Cloudflare Workers
- Pages
- D1
- Astro
- TypeScript
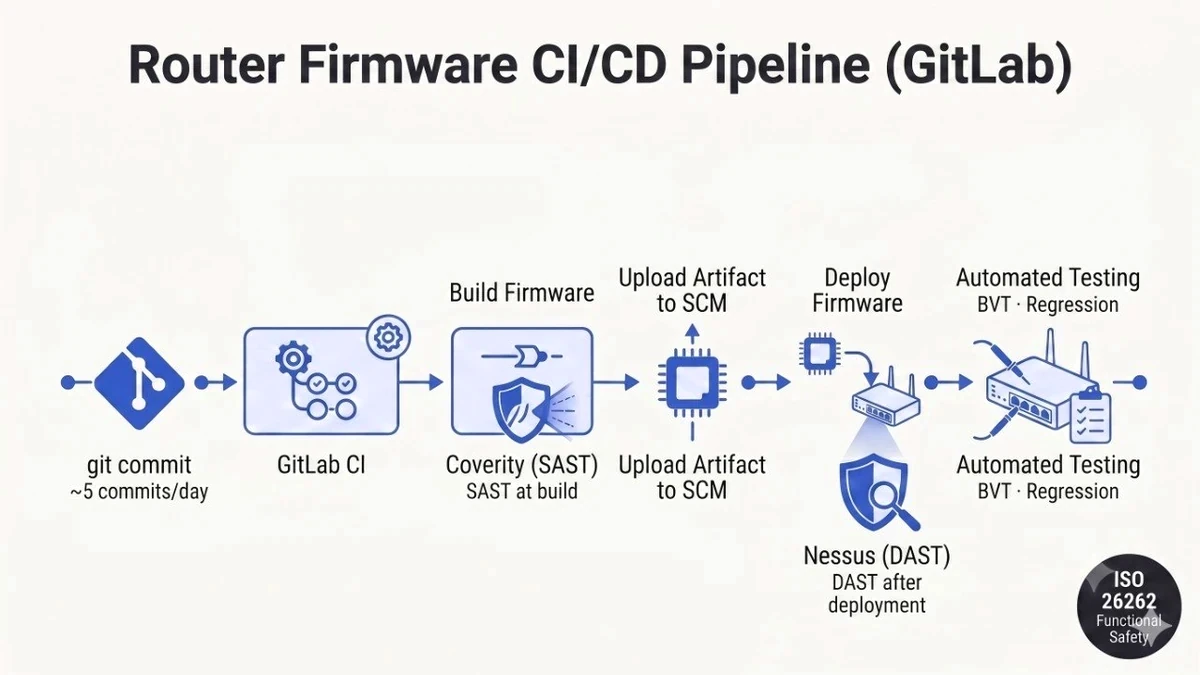
路由器韌體 CI/CD Pipeline(GitLab)
- GitLab CI/CD
- ISO 26262
- Coverity
- Nessus
- SAST
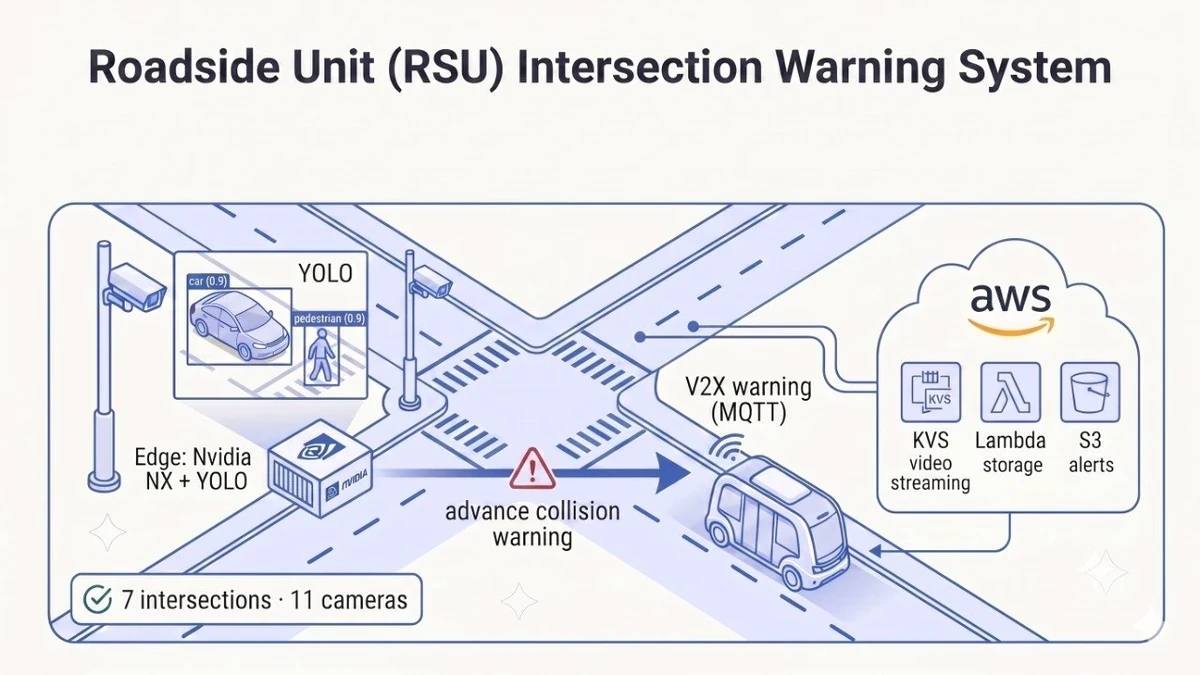
路側單元(RSU)路口警示系統
- Nvidia NX
- YOLO
- AWS KVS
- Lambda
- S3
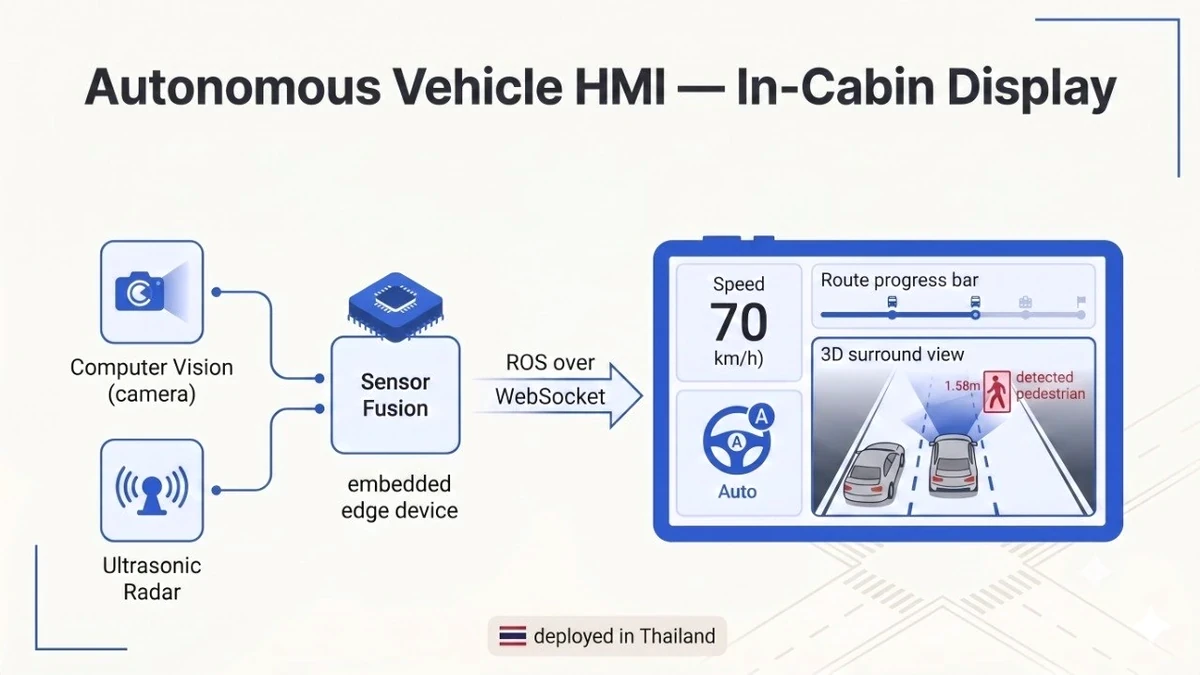
自駕車 HMI 人機介面(泰國場域)
- ROS
- WebSocket
- HMI
- 電腦視覺
- 超音波雷達
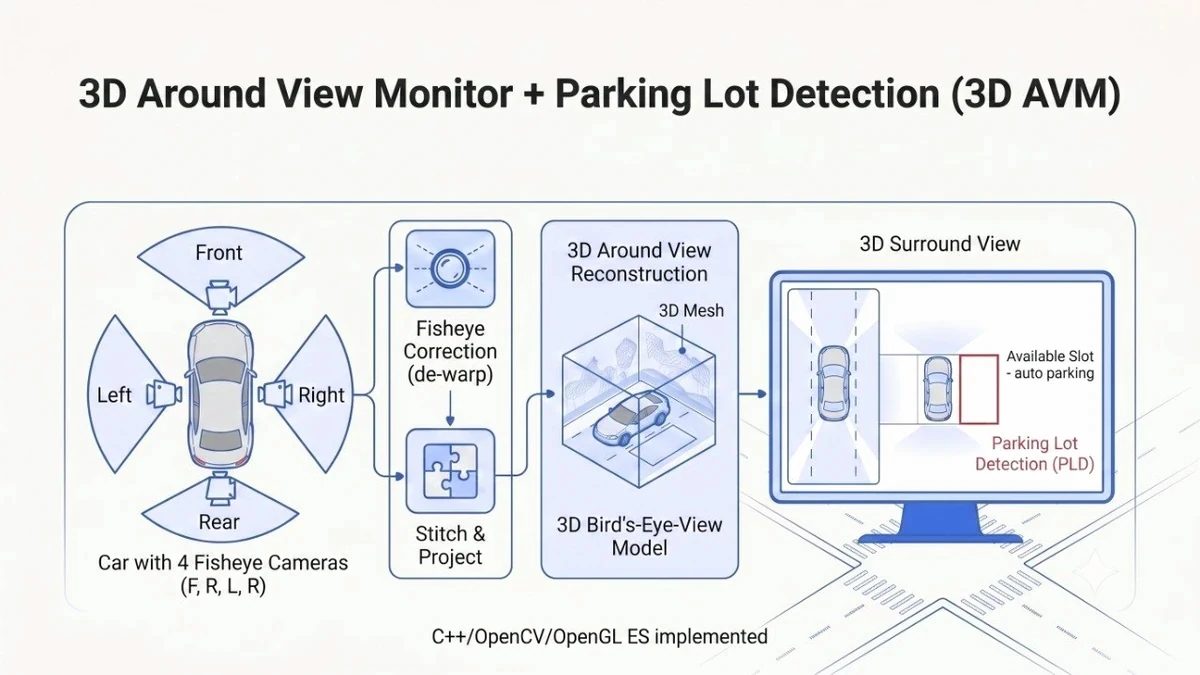
3D 環景監控 + 停車格偵測(3D AVM)
- OpenCV
- OpenGL ES
- 3D 重建
- 魚眼校正
- C++