路側單元(RSU)路口警示系統
- Nvidia NX
- YOLO
- AWS KVS
- Lambda
- S3
- MQTT
- V2X
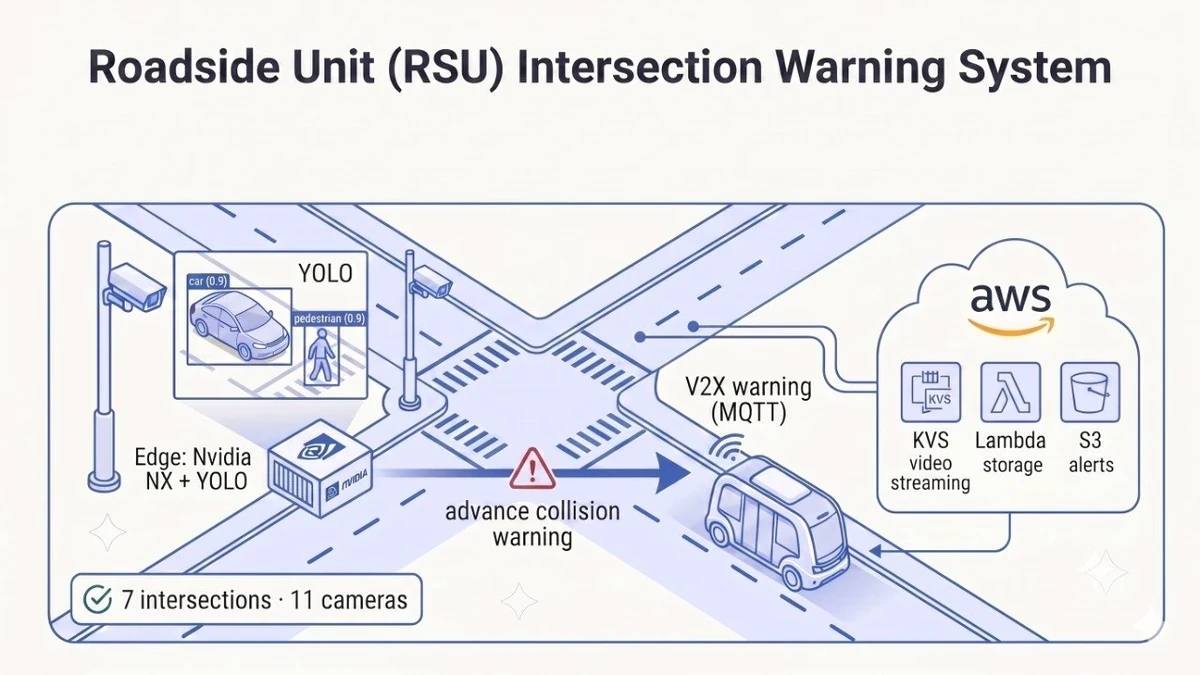
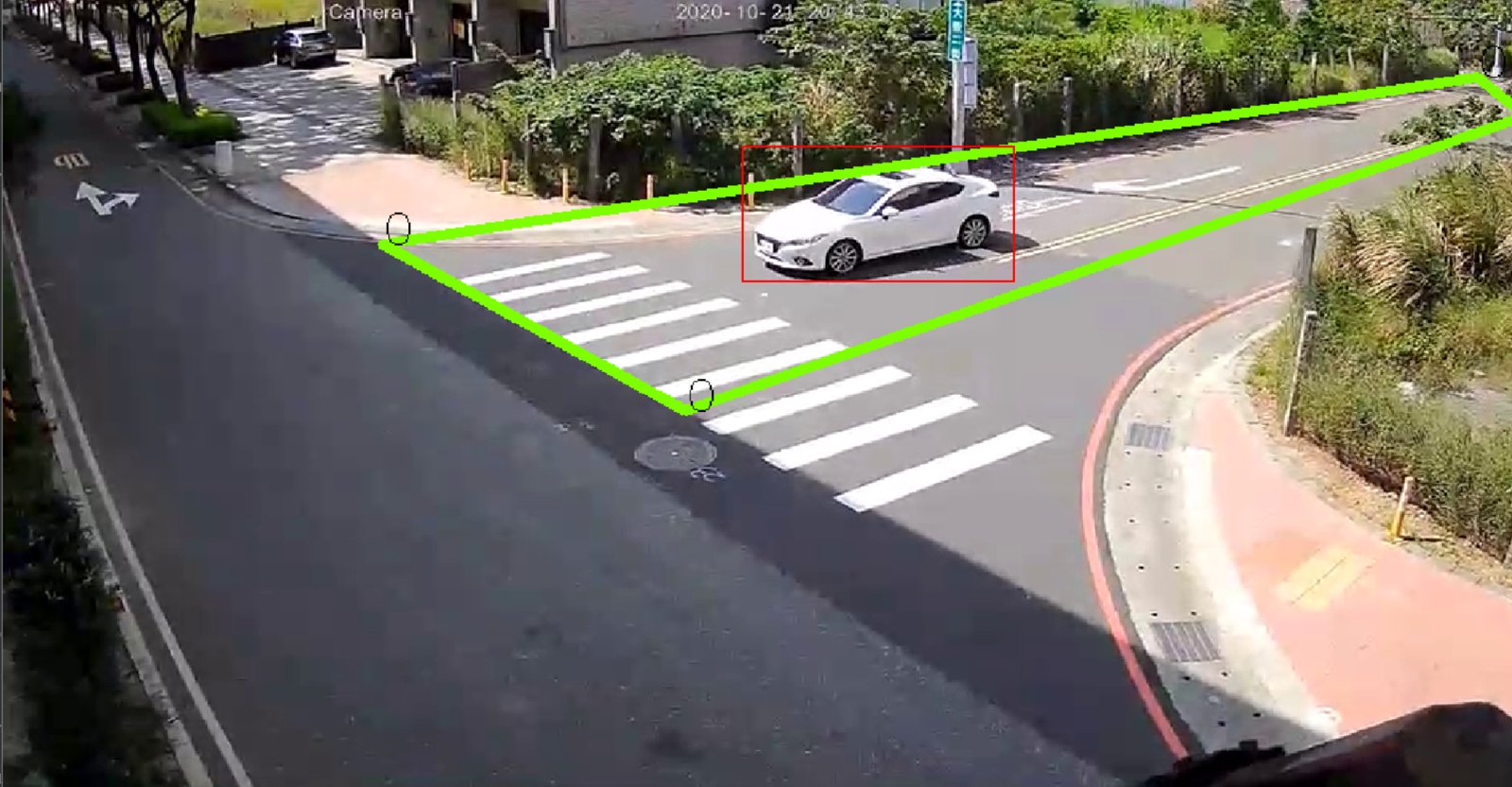
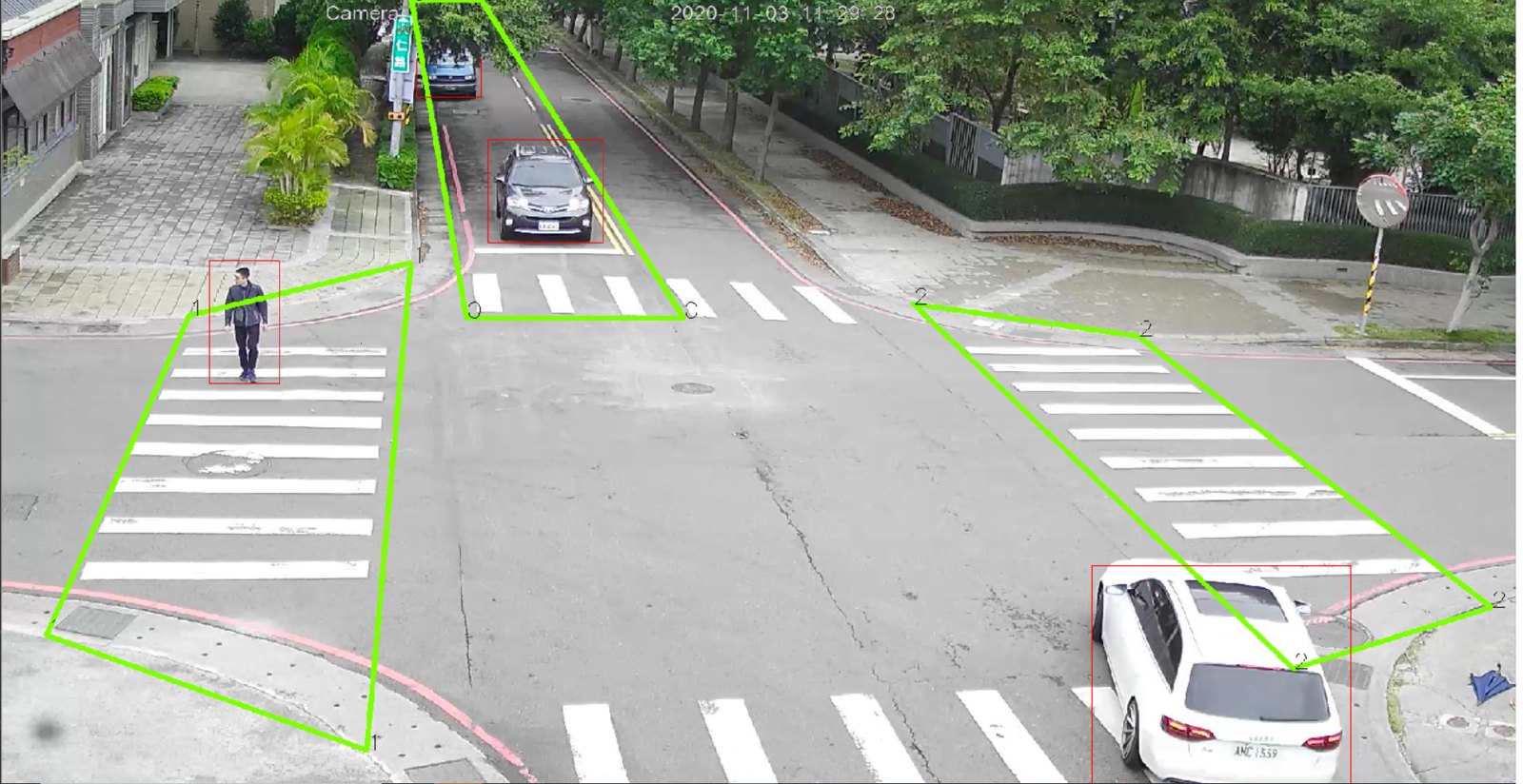
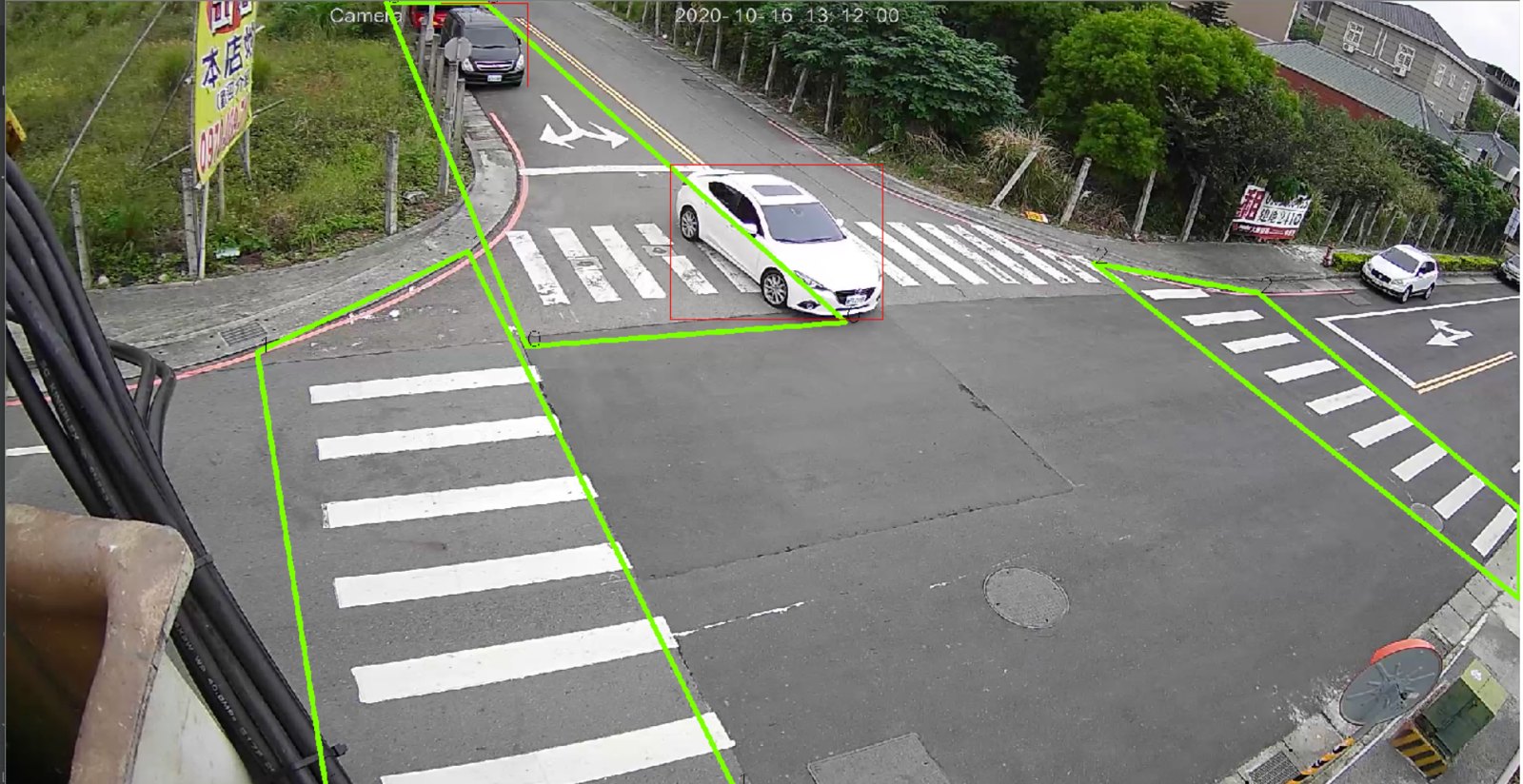
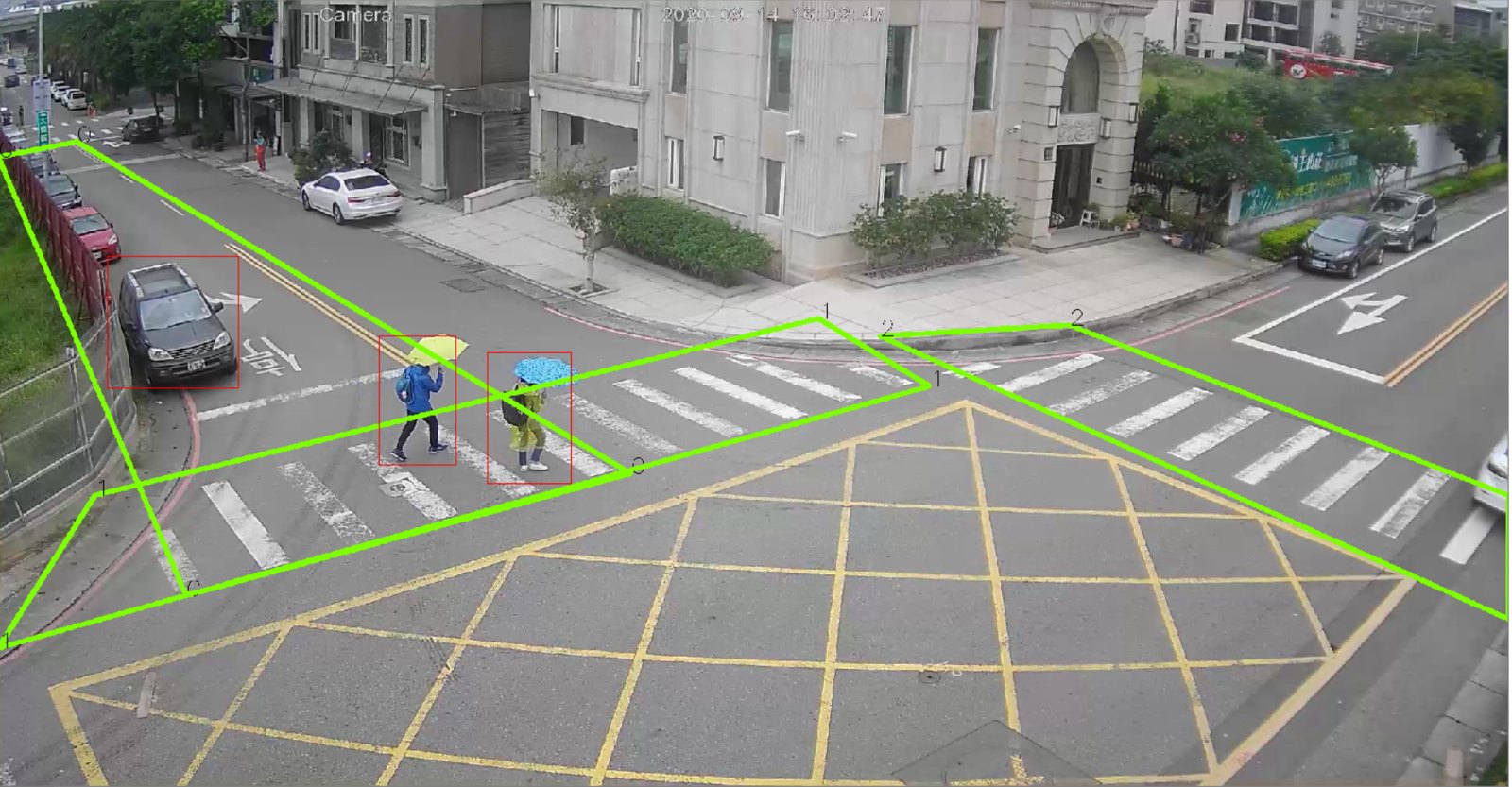
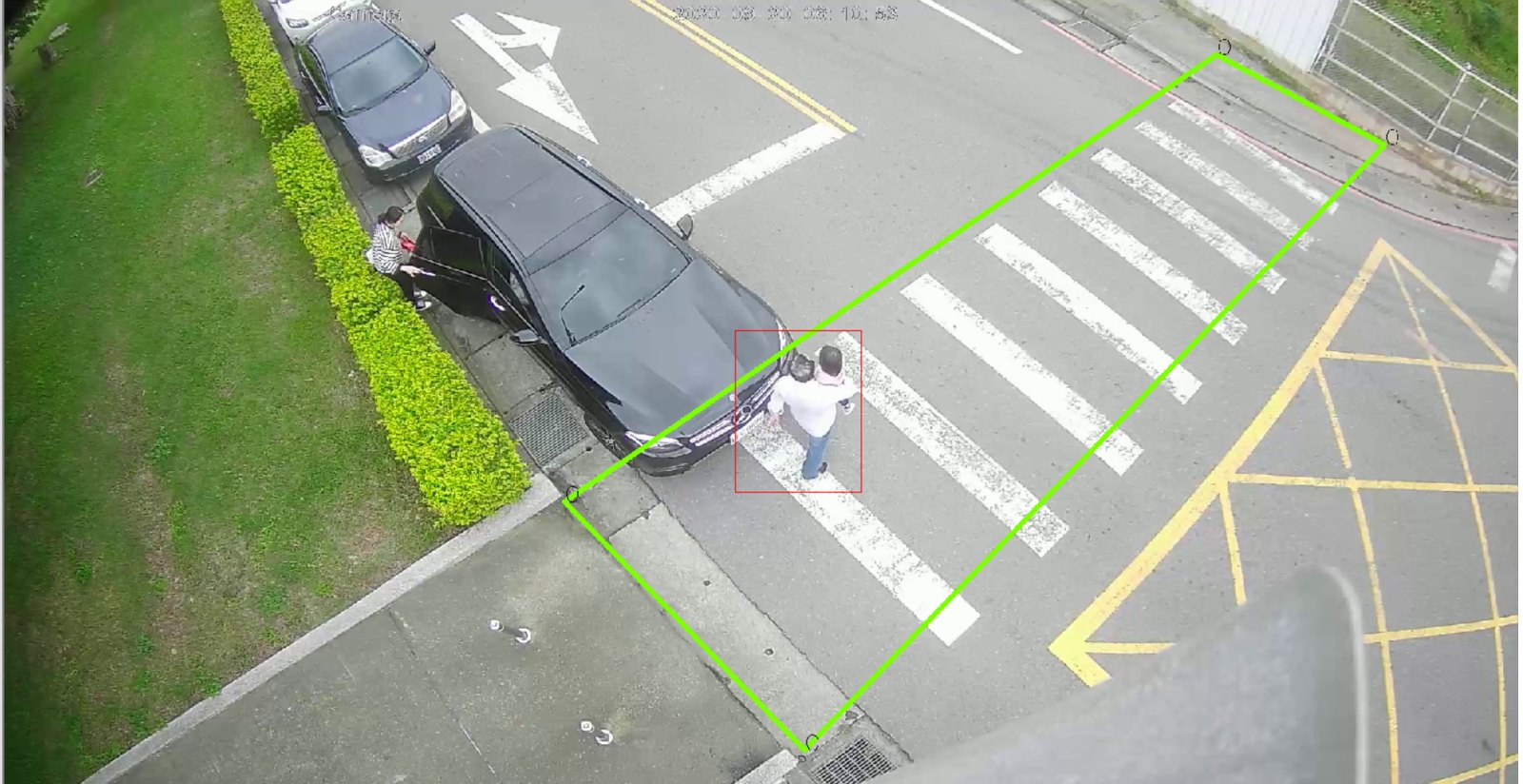
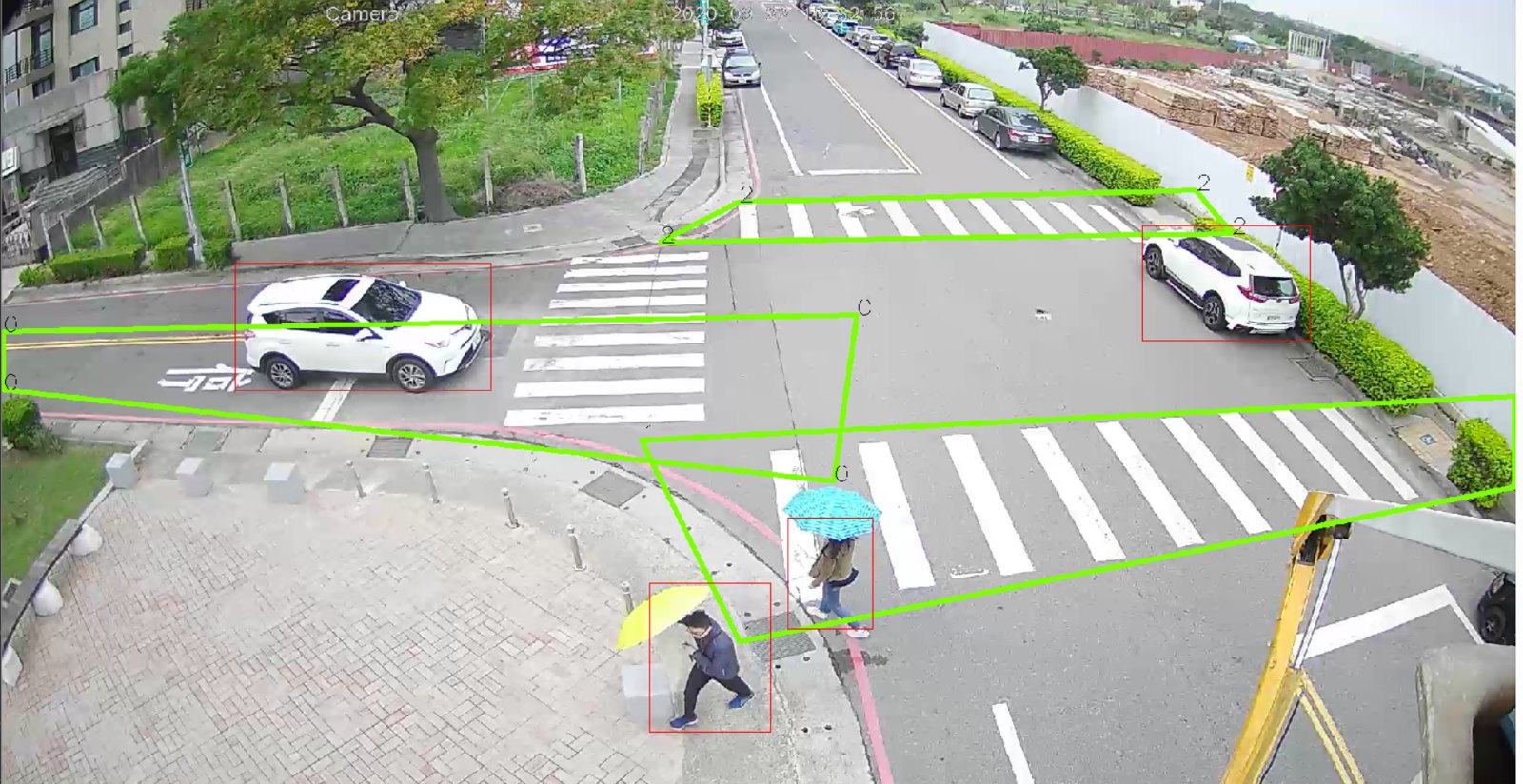
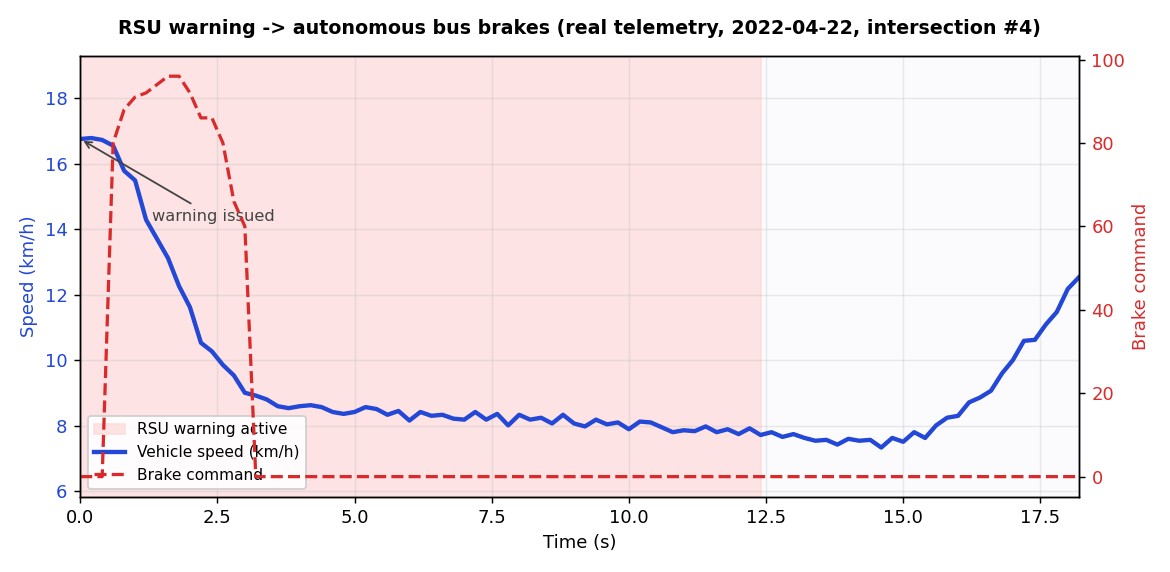
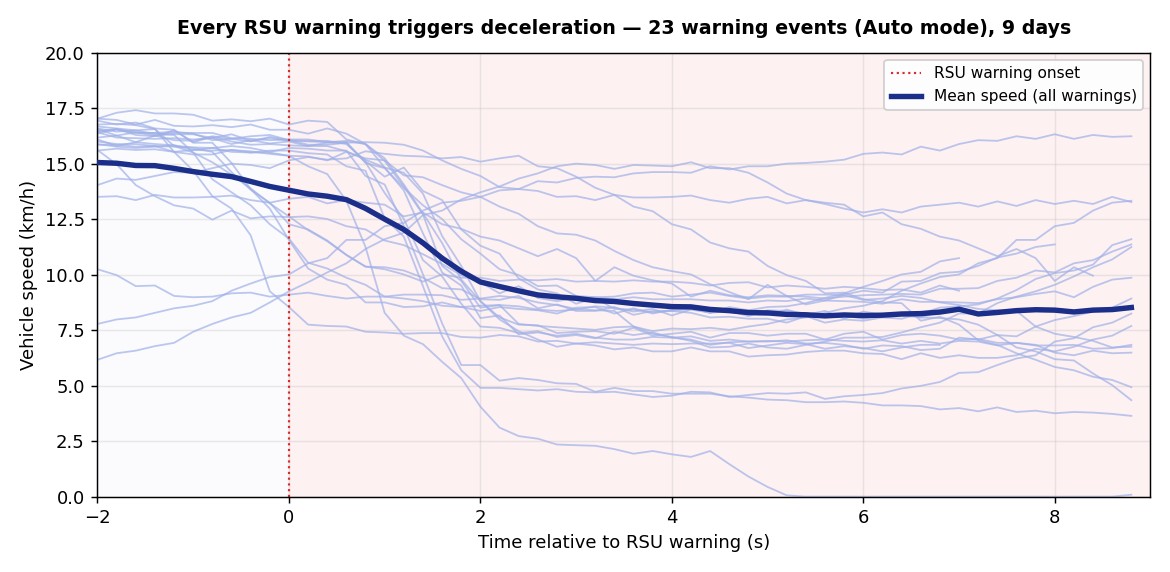
針對無號誌路口的自駕車安全方案。路側單元(RSU)架設於路口,在 Nvidia NX 邊緣平台上以 YOLO 即時偵測來車與行人,標定偵測區域並判斷碰撞風險,透過 MQTT(V2X) 將警示即時傳給自駕車,實現提前防撞。
雲端側以 AWS KVS / Lambda / S3 構成影像串流、儲存與警示管理服務,設計兼顧低延遲與高可靠。 我擔任技術負責人,協調演算法、嵌入式與雲端團隊穩定交付。
部署規模與成果:應用於 桃園市青埔自駕巴士創新實驗計畫(全國首條捷運接駁、深入社區的自駕巴士路線):
- 路側系統涵蓋 7 個路口、共 11 台監視器,即時守護混合車流的複雜路口。
- 2021 年試運行(平日 10:00–15:40、每 20 分一班),累計 載客破千人次、逾 9 成試乘滿意度。
- 估算營運約 1,000 趟次;以每趟於路口觸發 1–2 次示警估計,累積對自駕巴士提前示警約 1,000–2,000 次。

更多專案 ←→
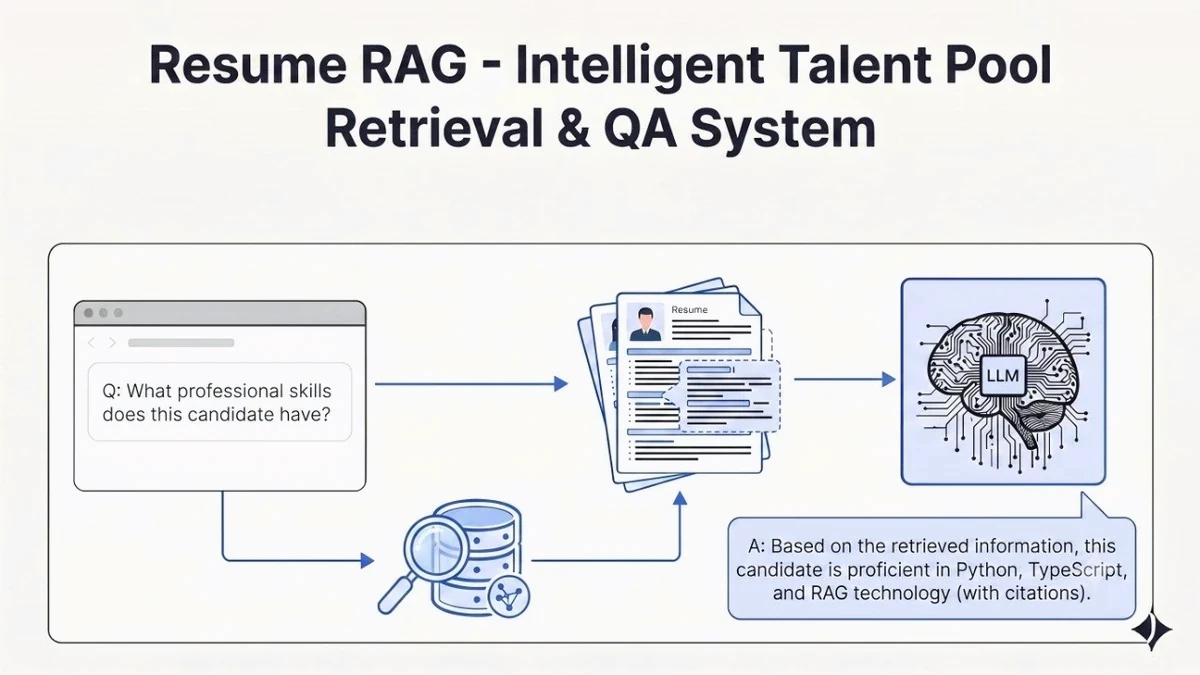
履歷 RAG 問答:Ask my resume
- Cloudflare Workers AI
- Vectorize
- bge-m3
- Llama 3.3
- RAG
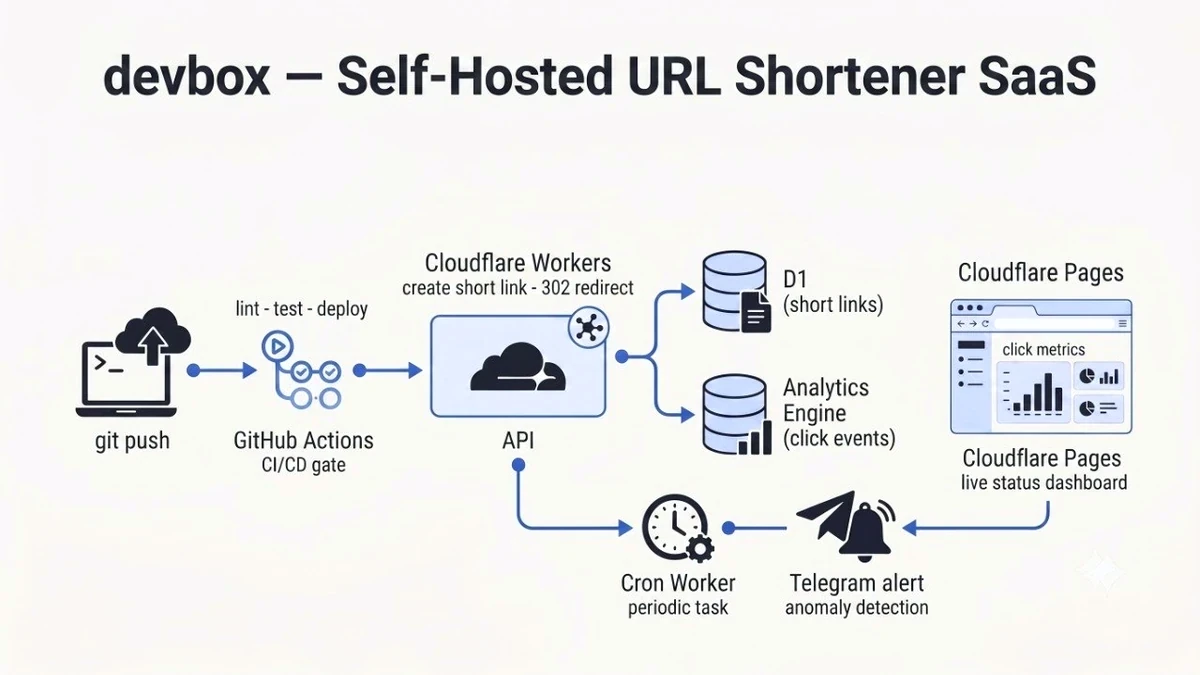
devbox:自架短網址 SaaS
- Cloudflare Workers
- D1
- Analytics Engine
- GitHub Actions
- Astro
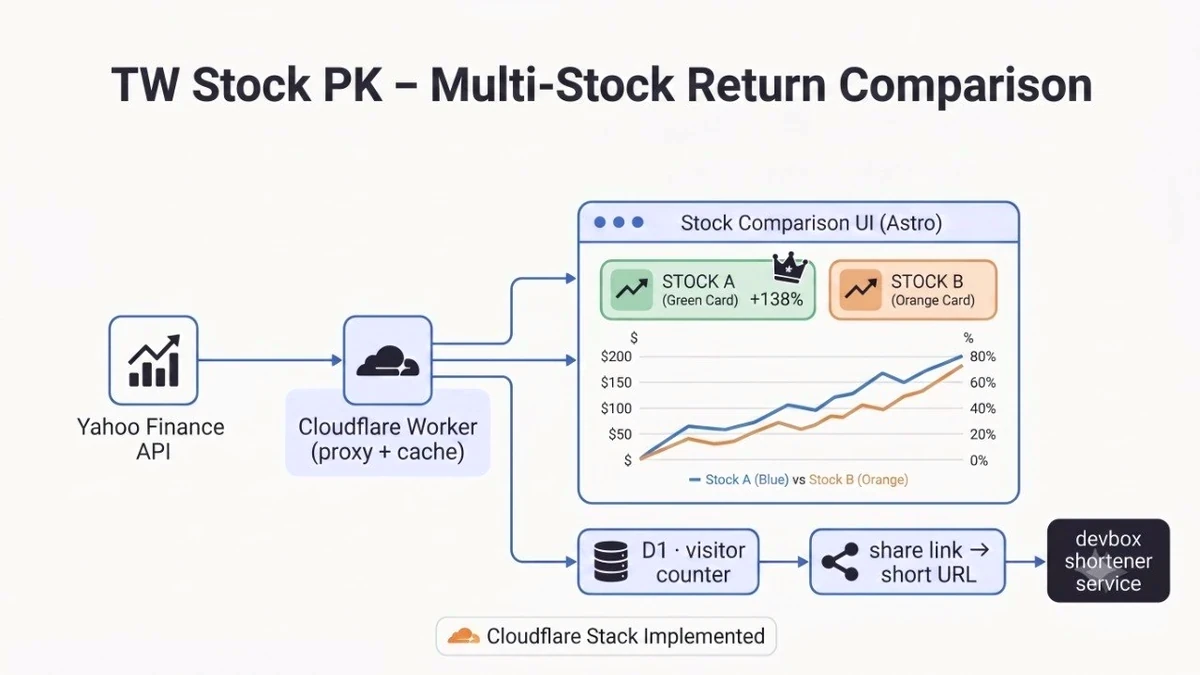
美股/台股多檔 PK:投報率比較工具
- Cloudflare Workers
- Pages
- D1
- Astro
- TypeScript
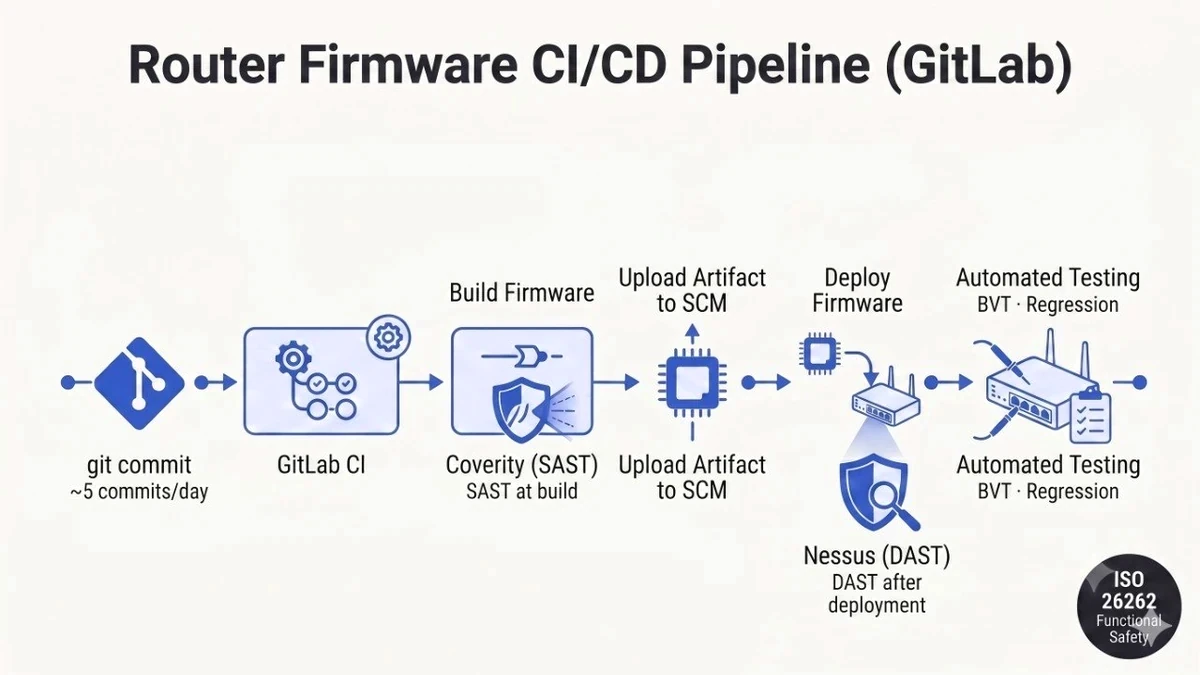
路由器韌體 CI/CD Pipeline(GitLab)
- GitLab CI/CD
- ISO 26262
- Coverity
- Nessus
- SAST
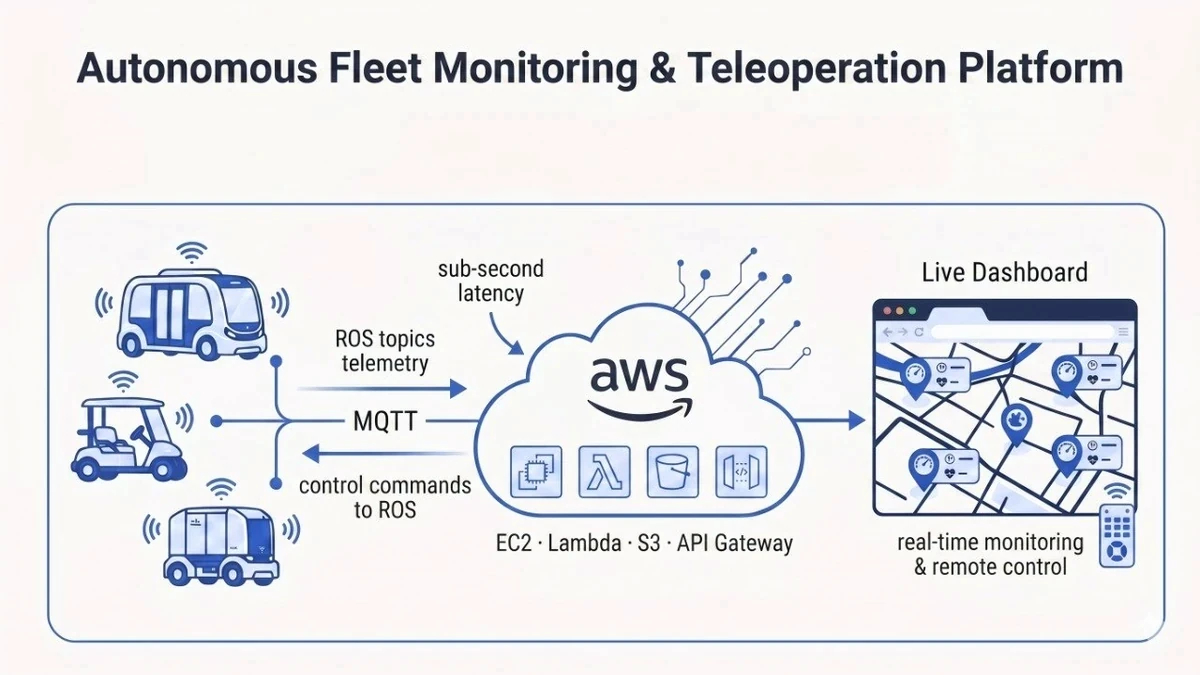
自駕車隊監控與遠端遙控平台
- AWS
- MQTT
- ROS
- Autoware
- WebSocket
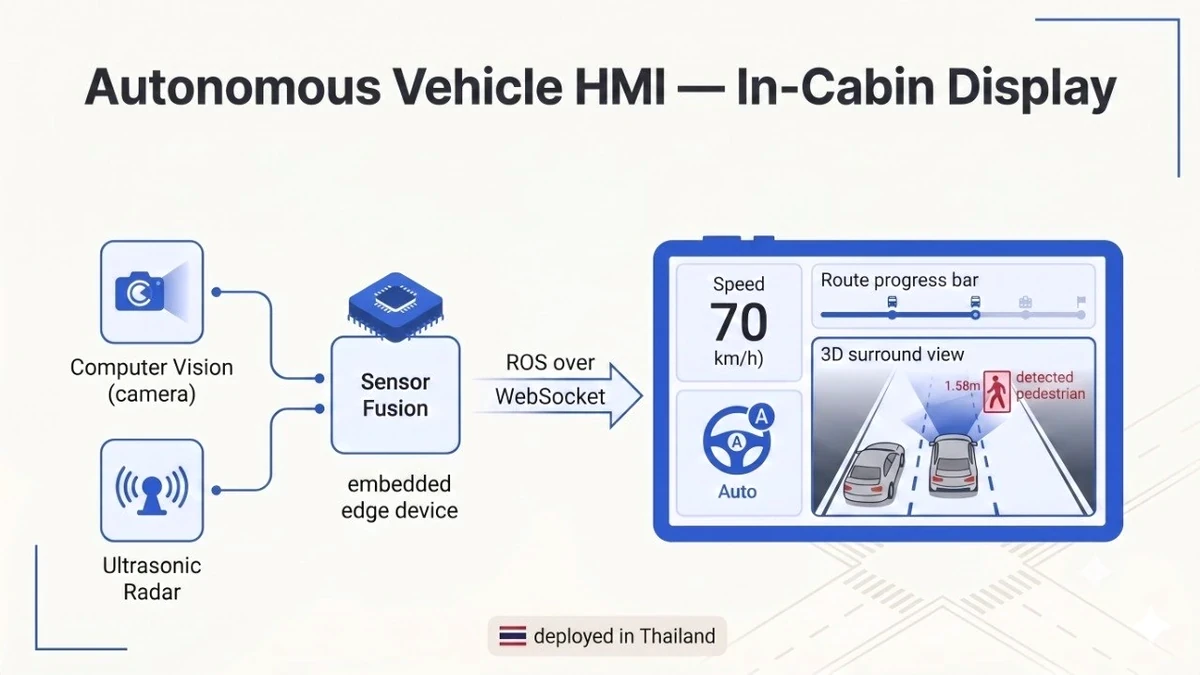
自駕車 HMI 人機介面(泰國場域)
- ROS
- WebSocket
- HMI
- 電腦視覺
- 超音波雷達
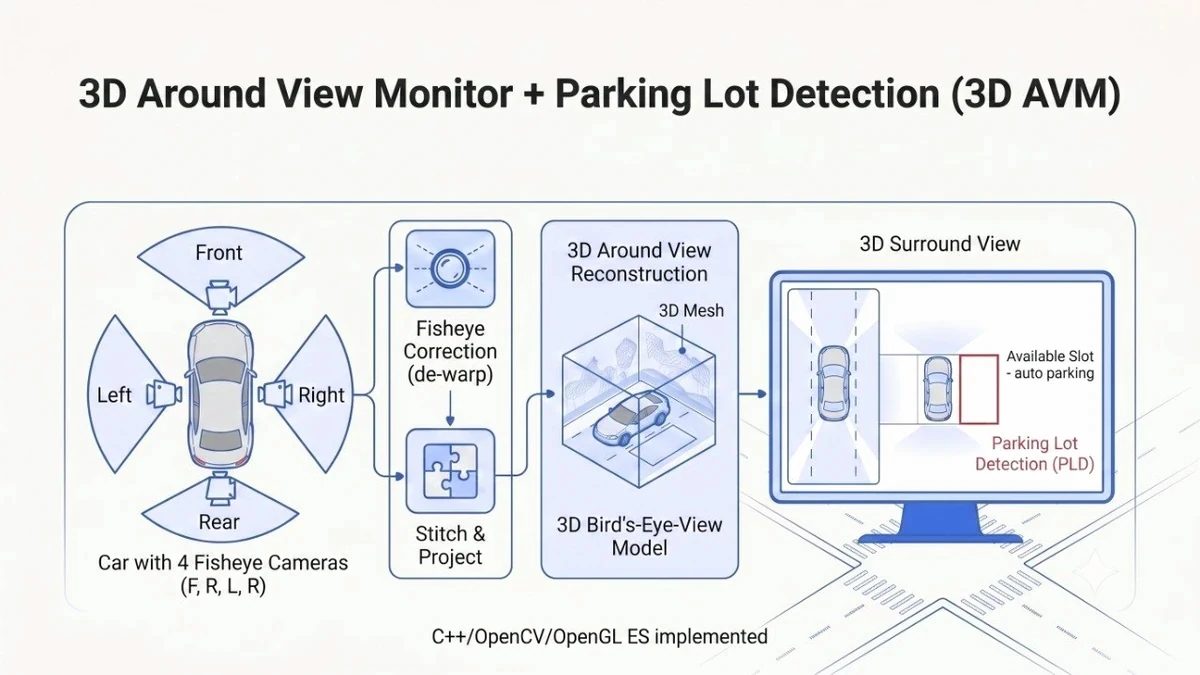
3D 環景監控 + 停車格偵測(3D AVM)
- OpenCV
- OpenGL ES
- 3D 重建
- 魚眼校正
- C++